Underwater robot depth control device based on linear active disturbance rejection technology and method thereof
An underwater robot, linear active disturbance rejection technology, applied in the direction of height or depth control, can solve the problems of difficult real-time control, long system response time, etc., and achieve simple and easy control method, good robustness and dynamic characteristics, The effect of high practical value
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
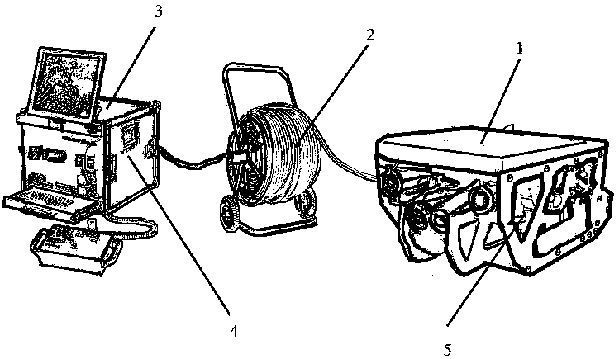
[0037] see figure 1 , the underwater robot depth control device based on linear active disturbance rejection technology, the sensor 5 is installed on the bottom of the underwater robot 1, the computer 3 is connected to the underwater robot 1 through the cable 2, the control board 4 is installed on the control motor, based on the linear automatic The depth control method of the anti-disturbance technology is stored inside the control board 4 . The sensor 5 installed on the underwater robot 1 is connected with the control board 4 on the computer 3 through the cable 2 to realize reading of relevant data, central data interaction function and system power supply. The control board 4 uses the depth control method of the linear active disturbance rejection technology to perform control calculation, output control instructions, and the actuator of the underwater robot 1 executes the control instructions to complete the depth motion control of the underwater robot 1 .
Embodiment 2
[0039] see
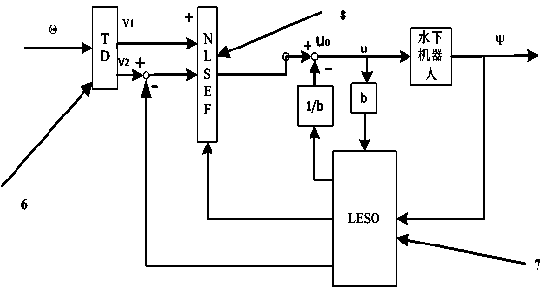
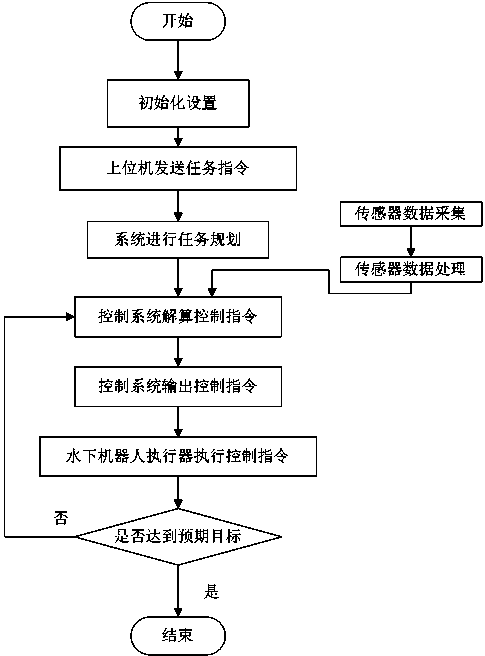
[0040] attached figure 2 And attached image 3 , the underwater robot depth control method based on linear active disturbance rejection technology, using the above-mentioned device for operation, the specific implementation steps can be expressed as:
[0041] 1) The underwater robot 1 is initialized, and the initialization of the underwater robot 1's position, attitude and sensor 5 is completed;
[0042] 2) The control board 4 accepts the task instruction, performs task planning, and sends the planning result to the computer 3
[0043] 3) The sensor 5 acquires depth, speed, attitude angle information;
[0044] 4) The control computer 3 receives the feedback information from the sensor 5 and the task information, and uses the depth control method based on the linear active disturbance rejection technology to perform control calculations. The desired depth of the underwater robot 1 is used as the input signal of the tracking differentiator 6, and each sensor Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com