2-DOF (Degree of Freedom) robot remote operation device with force immediacy
One-DOF and robot technology, applied in manipulators, manufacturing tools, etc., can solve problems such as unsuitable engineering applications, expensive equipment, and unsatisfactory, to enhance smooth operation, improve position control accuracy, and improve fidelity Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] Describe the present invention in detail below in conjunction with embodiment and accompanying drawing. The embodiments are carried out on the premise of the technical solutions of the present invention, and detailed implementation methods and processes are given. However, the protection scope of the claims of the present invention is not limited to the following examples.
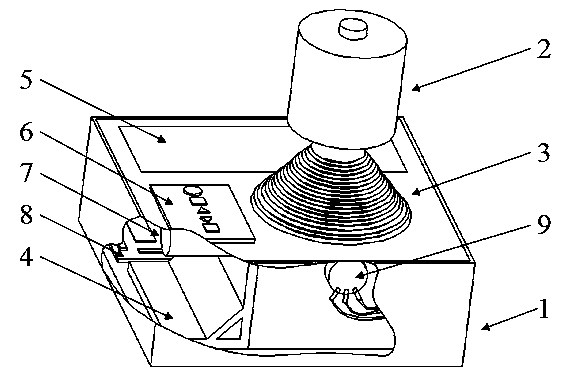
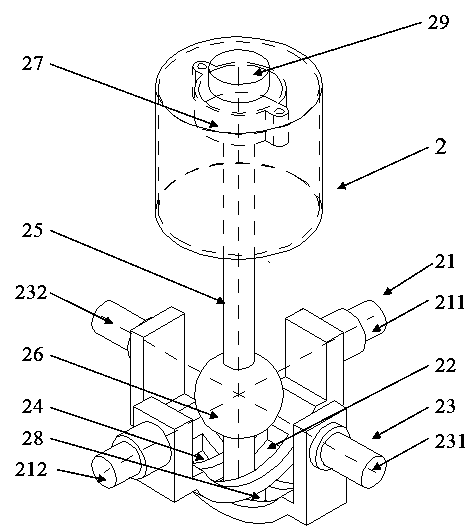
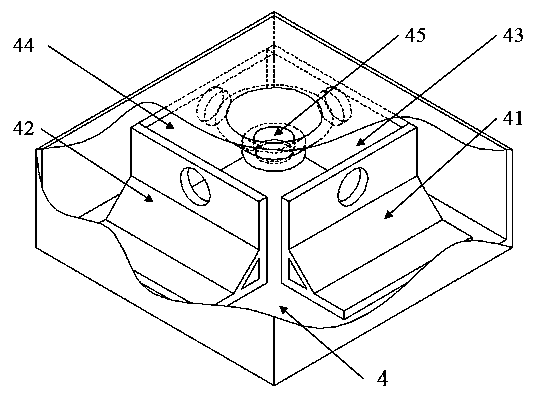
[0022] The 2-DOF robot remote operation device (hereinafter referred to as the remote operation device) designed by the present invention has force sense of presence, see Figure 1-6 ) is based on the principle of the robot, follows the modular design idea of the robot, adopts the modular design, and is designed according to the working principle of the remote control system of the robot.
[0023]The remote operation device is characterized by mainly comprising: a box body 1 , an operating handle 2 , a support structure 4 , a liquid crystal display module 5 , a control panel 6 , a DC motor 7 , an...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com