Map matching-assistant indoor positioning method
A positioning method and map matching technology, which can be used in wireless communication services, electrical components, wireless communication, etc., and can solve problems such as computational redundancy.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
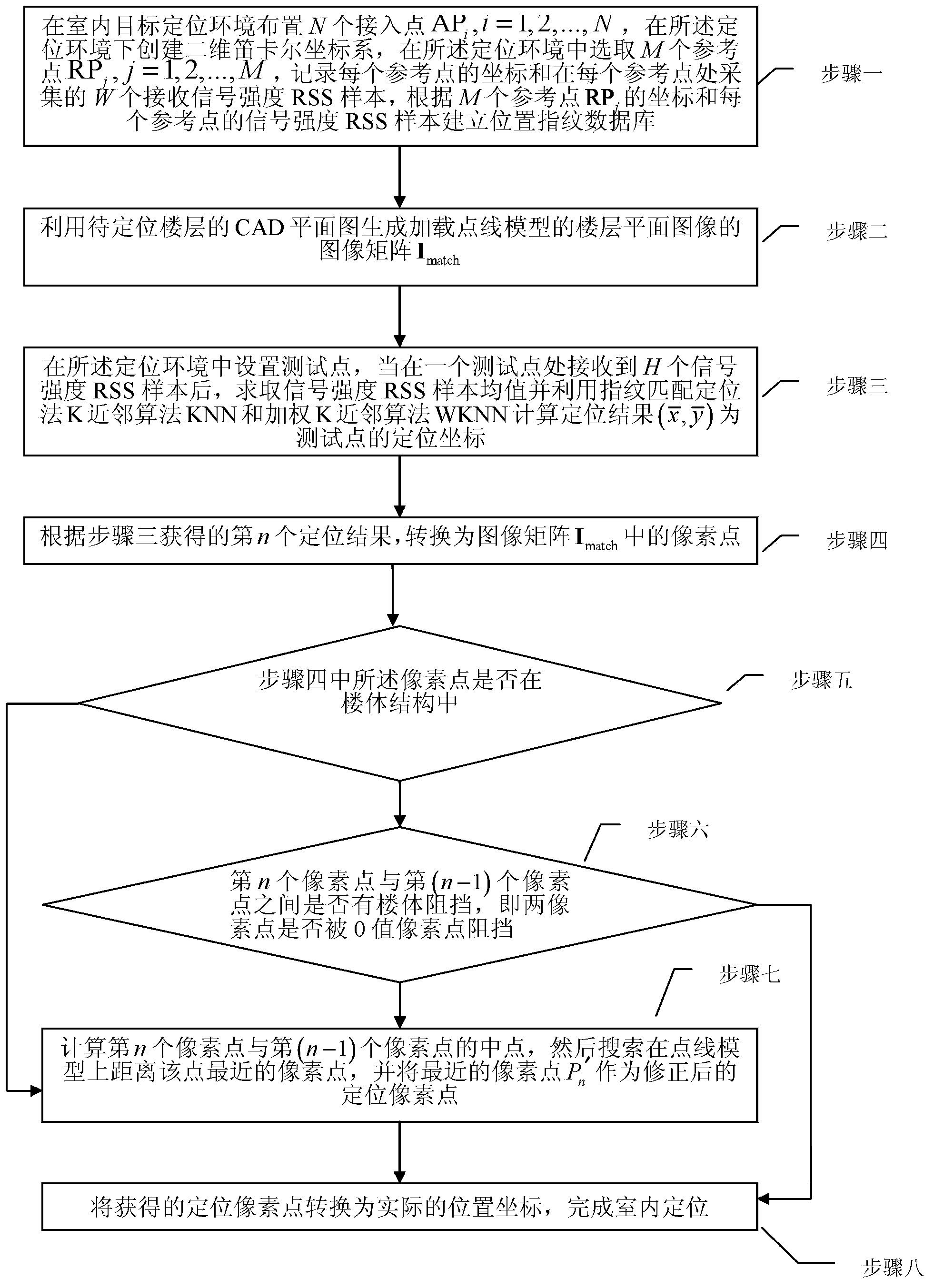
[0030] Specific implementation mode 1. Combination figure 1 This specific embodiment will be described. A map matching assisted indoor positioning method, it comprises the following steps:
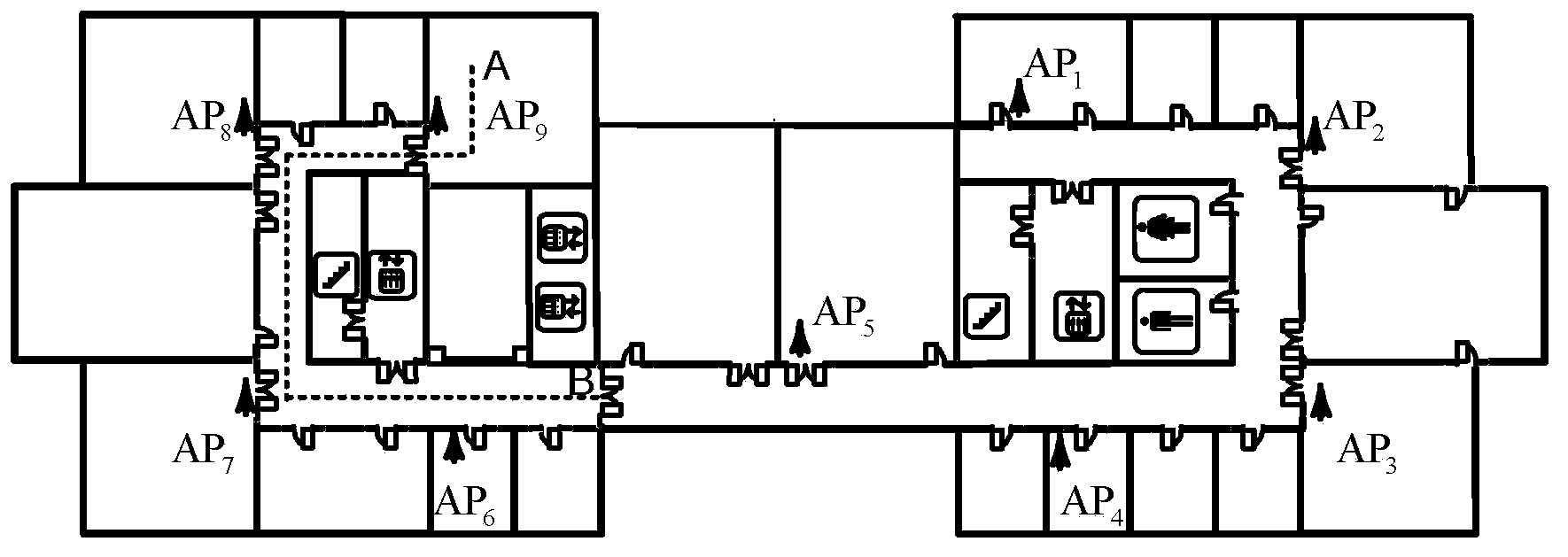
[0031] Step 1: Arrange N access points AP in the indoor target positioning environment i ,i=1,2,...,N, create a two-dimensional Cartesian coordinate system in the positioning environment, and select M reference points RP in the positioning environment j ,j=1,2,...,M, record the coordinates of each reference point and W received signal strength RSS samples collected at each reference point, according to M reference points RP j The coordinates and the signal strength RSS samples of each reference point establish a location fingerprint database;
[0032] Step 2: Use the CAD plan of the floor to be located to generate the image matrix I of the floor plan image of the loaded point-line model match ;
[0033] Step 3: Set test points in the positioning environment. After receiving H signal s...
specific Embodiment approach 2
[0039] Specific embodiment two, the difference between this specific embodiment and specific embodiment one is described step 2: Utilize the CAD plan of the floor to be positioned to generate the image matrix I of the floor plan image of the loaded point line model match The process is:
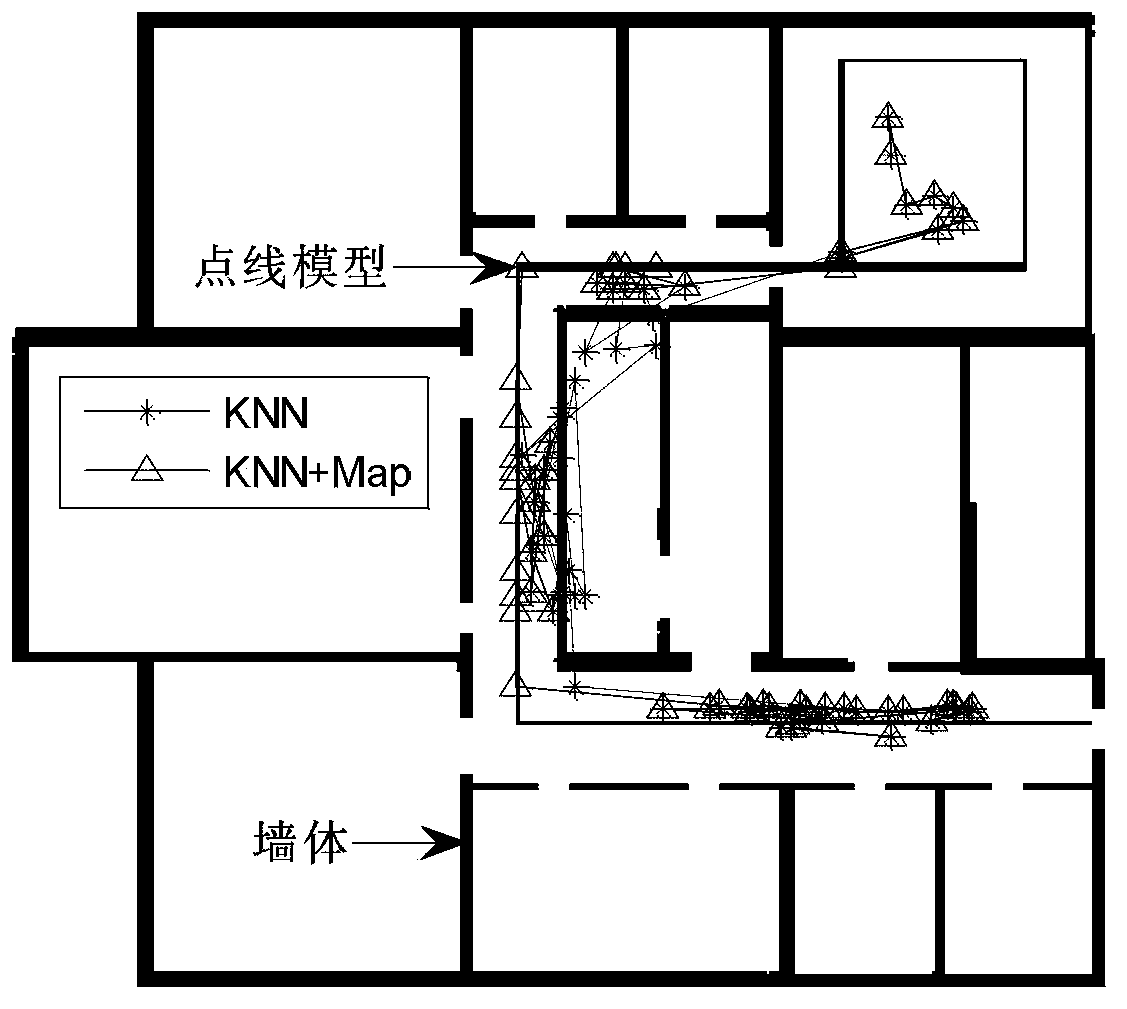
[0040] After the point-line model is loaded into the CAD plan of the floor, a CAD plan of the loaded point-line model can be obtained; the CAD plan after loading the point-line model and the original CAD plan are respectively saved as pictures; the two pictures are respectively Convert to two binary image matrices I model and I no_model;In these two binary image matrices, set the pixel points of people's daily activity area to value +1, and set the pixel points of the building structure and point-line model to value 0;
[0041] Get indoor map image matrix I match :
[0042] I no_model -2×(I model ⊕I no_model )=I match
[0043] Among them, ⊕ is an XOR operation. So, in the floor plan...
specific Embodiment approach 3
[0044] Specific embodiment three, the difference between this specific embodiment and specific embodiment one or two is that the step three: set test points in the positioning environment, after receiving H signal strength RSS samples at a test point, Find the average value of the signal strength RSS sample and use the fingerprint matching positioning method K-nearest neighbor algorithm KNN and weighted K-nearest neighbor algorithm WKNN to calculate the positioning result The process of positioning coordinates for the test point is:
[0045] According to the fingerprint matching positioning method K nearest neighbor algorithm KNN to obtain the formula:
[0046] D i = ( Σ j = 1 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com