Mobile robot positioning system based on two-dimensional code navigation belt
A mobile robot and positioning system technology, applied in two-dimensional position/channel control, etc., can solve problems such as insufficient feedback information, failure to receive, no information feedback, etc., achieve simple processing methods, increase operating speed, and ensure high efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
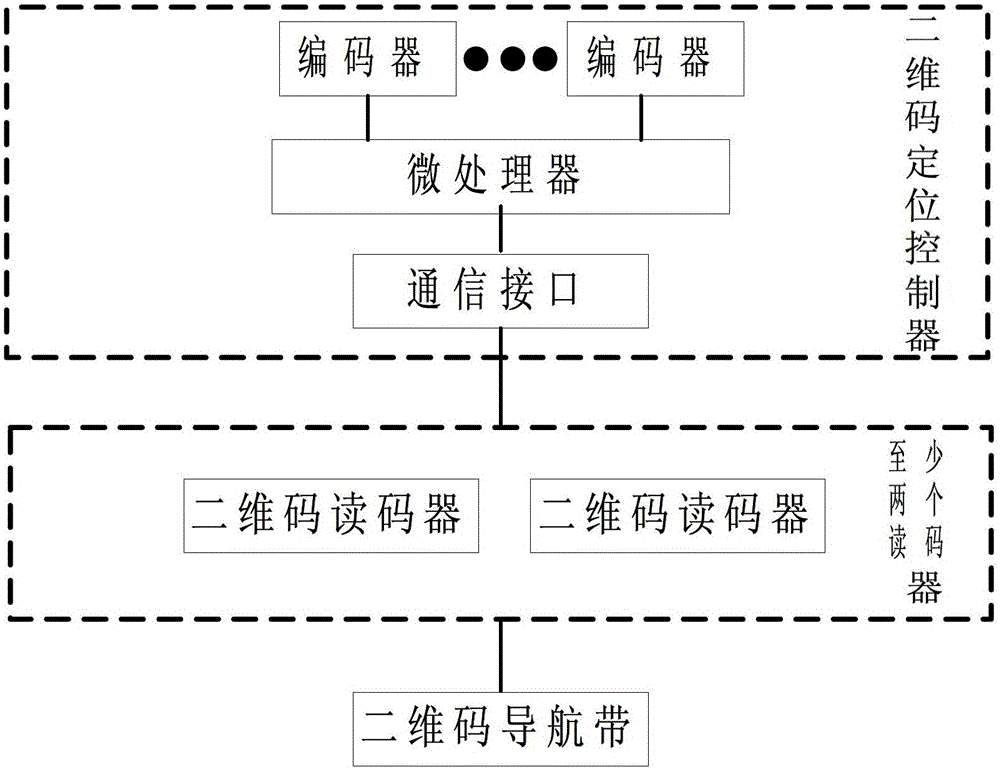
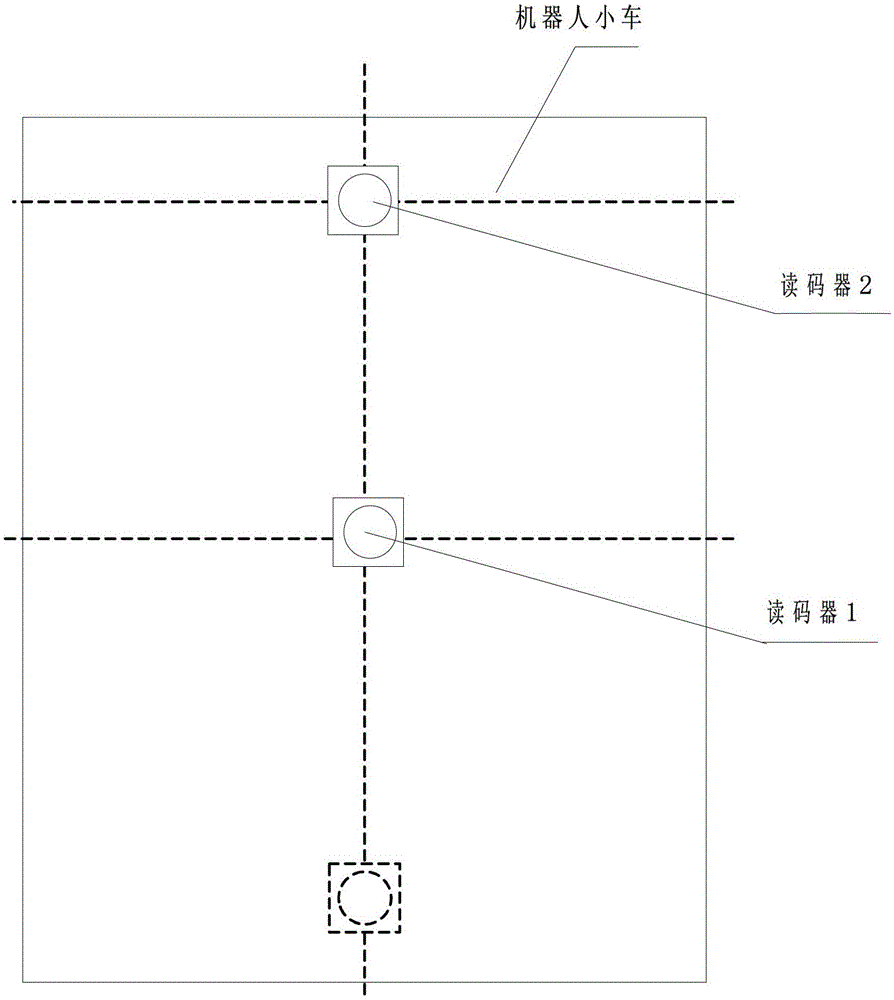
[0020] A mobile robot positioning system based on a two-dimensional code navigation belt, such as figure 1 As shown, it includes a two-dimensional code positioning controller installed on a mobile robot car, at least two two-dimensional code readers and a two-dimensional code navigation belt laid on the ground. The two-dimensional code positioning controller is controlled by a micro A processor, an encoder and a communication interface are connected, the microprocessor is connected with the encoder to detect the running speed of the mobile robot, and the microprocessor is connected with at least two two-dimensional code readers through the communication interface to collect two The two-dimensional code navigation carries information and realizes the precise positioning function of the mobile robot. The installation position of the two-dimensional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com