Mobile robot positioning system based on two-dimension code navigation band
A mobile robot and positioning system technology, applied in two-dimensional position/channel control and other directions, can solve problems such as insufficient feedback information, failure to receive, delay time, etc., and achieve the effect of simple processing method, increased operating speed, and improved cost performance
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
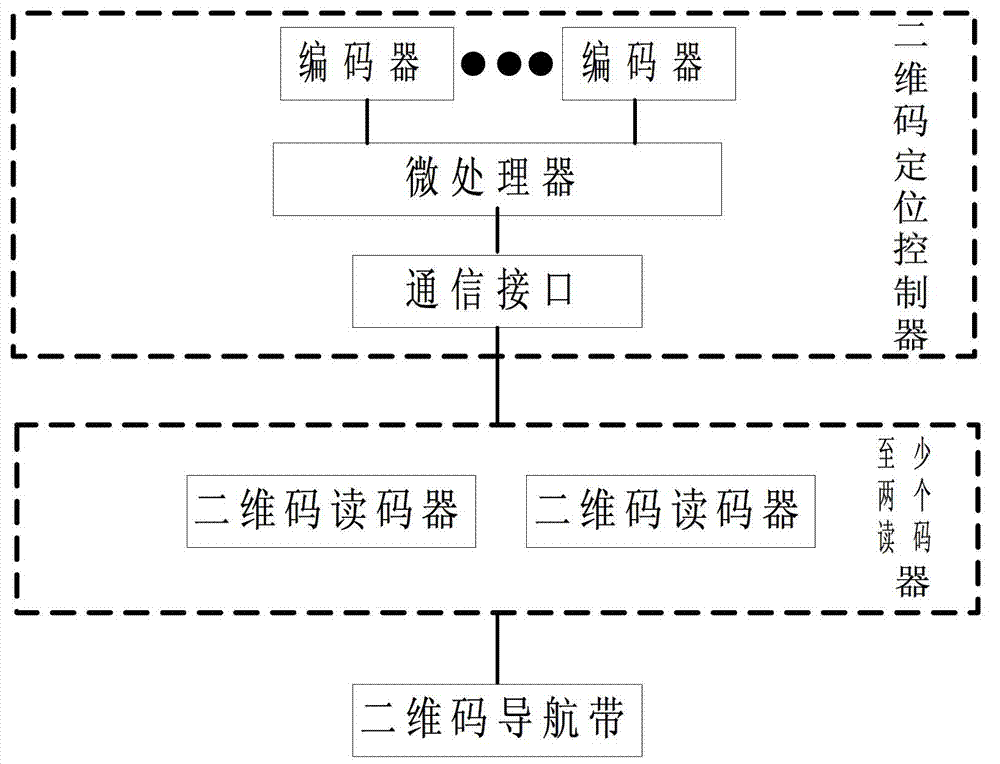
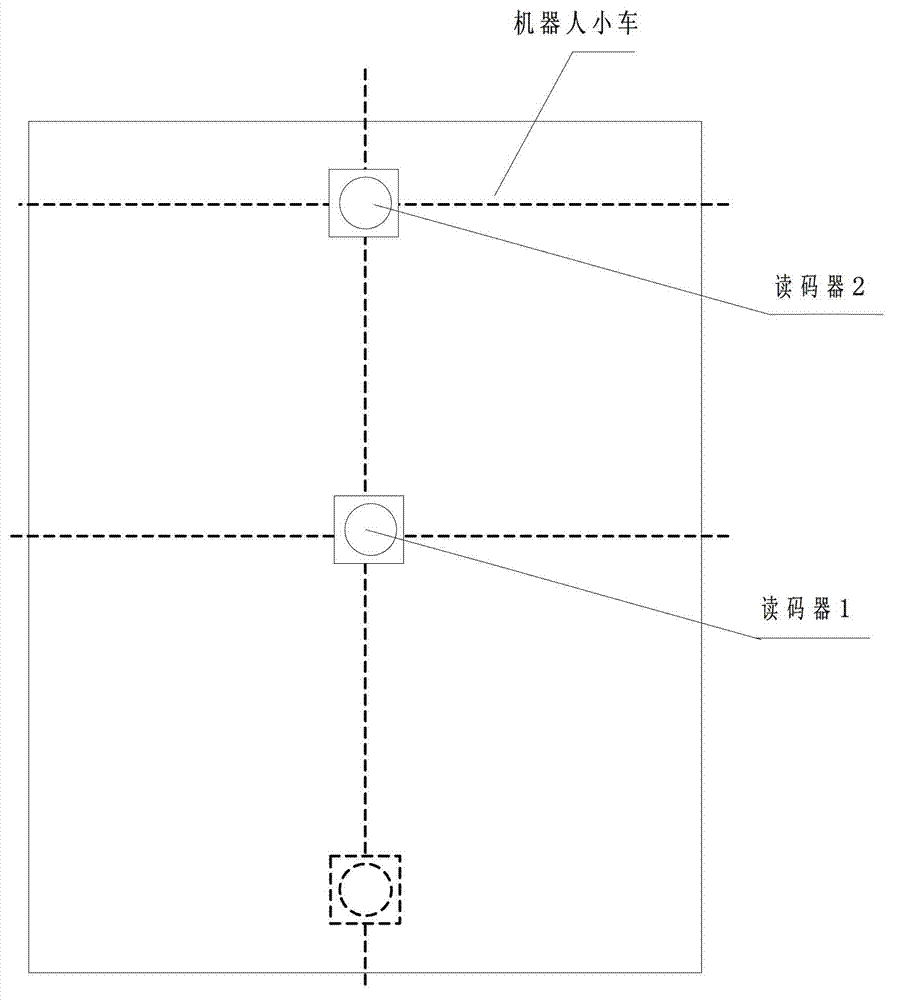
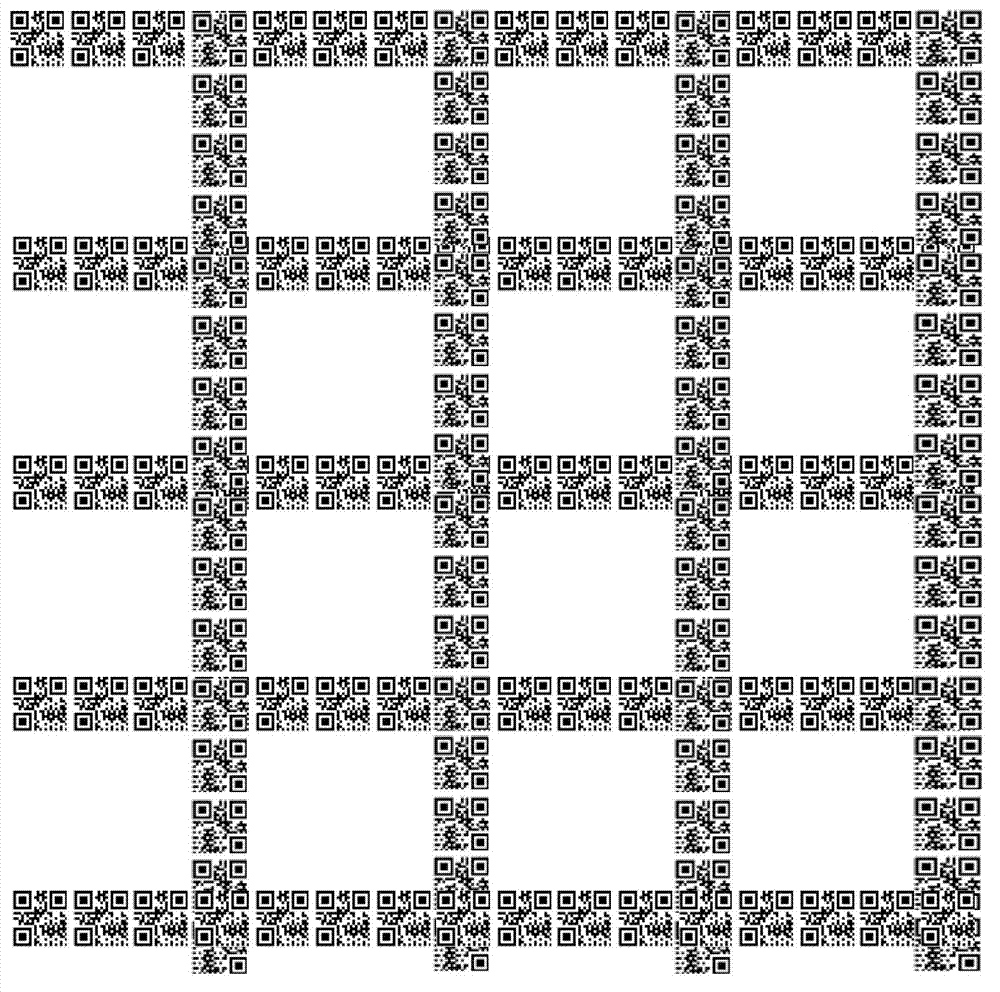
[0020] A mobile robot positioning system based on a two-dimensional code navigation belt, such as figure 1 As shown, it includes a two-dimensional code positioning controller installed on a mobile robot car, at least two two-dimensional code readers and a two-dimensional code navigation belt laid on the ground. The two-dimensional code positioning controller is controlled by a micro A processor, an encoder and a communication interface are connected, the microprocessor is connected with the encoder to detect the running speed of the mobile robot, and the microprocessor is connected with at least two two-dimensional code readers through the communication interface to collect two The two-dimensional code navigation carries information and realizes the precise positioning function of the mobile robot. The installation position of the two-dimensional ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com