An underwater working robot
An underwater operation and robot technology, applied in the field of robots, can solve the problems of inconvenient rapid replacement of end effectors, failure to realize the modular design of robots, and increase the difficulty of sealing. , the effect of convenient disassembly and replacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
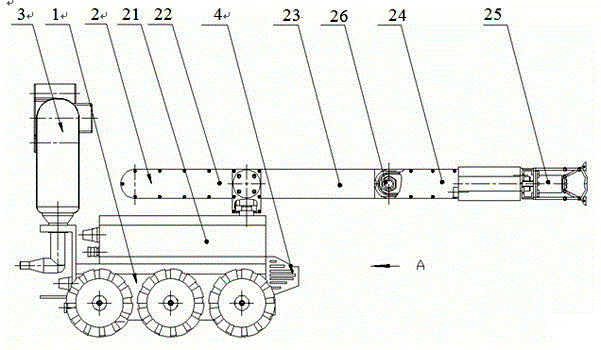
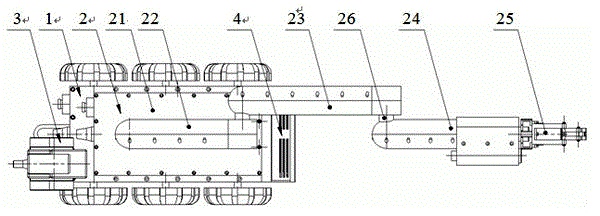
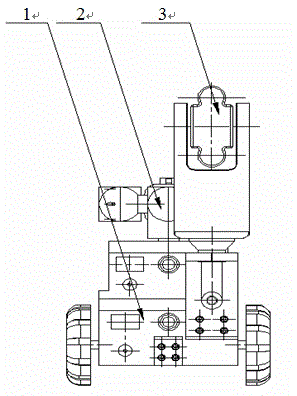
[0052] The robot is composed of a car body module 1, a manipulator module 2, an underwater camera module 3, a functional component module 4 and a control module 5. When handling general tasks, the robot is mainly assembled from the storage box 41 in the car body module 1, the manipulator module 2, the underwater camera module 3, and the functional component module 4. During the movement of the robot, the manipulator module 2 is folded above the car body. At this time, the external dimensions of the robot are 590mm×294mm×520mm in length×width×height. The outer dimensions of the robot body module 1 are 400mm×200mm×150mm in length×width×height, and wheels of different sizes can be selectively installed. In this embodiment, wheels with a diameter of 140mm are assembled, and the ground clearance is 35mm, which can realize 0-24m / min Continuously variable speed, climbing ability ≥ 30° on smooth steel plate.
[0053] The manipulator module 2 is composed of a base 21 , a waist 22 , a ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com