Autonomous mobile mechanism capable of walking on surface of work piece and adjusting gesture
A technology of autonomous movement and workpiece surface, applied in metal processing and other directions, can solve problems such as large volume and complex structure, and achieve the effect of good flexibility, simplified overall structure, and large displacement compensation ability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0030] The present invention will be further described below in conjunction with the accompanying drawings and embodiments.
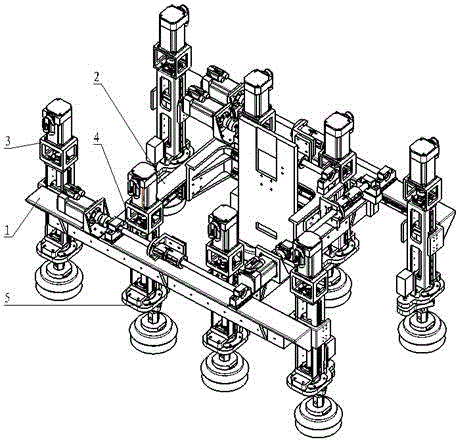
[0031] Such as Figure 3-10 shown.
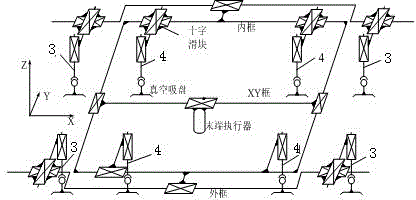
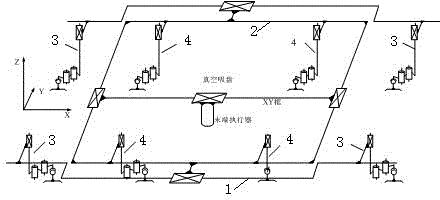
[0032] An autonomous mobile mechanism capable of walking and adjusting posture on the surface of a workpiece, which includes an outer frame structure 1, an inner frame structure 2, outer frame lifting legs 3 and inner frame lifting legs 4, such as figure 2 As shown, there are two outer frame structures 1, which are symmetrically installed on the opposite sides of the inner frame structure 2, and each outer frame structure is connected with two outer frame lifting legs 3 to support the four legs of the outer frame structure 1. Among the outer frame lifting legs, one lifting leg can be designed as a non-adjustable structure, that is to say, at least three outer frame lifting legs 3 must be able to be adjusted. The lifting principle and structure of the outer frame long lowering leg 3 can be compared with the exis...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com