Singularity margin detection method based on screw space included angle for serial and parallel robot mechanisms
A space angle and robot technology, applied in the direction of instruments, special data processing applications, electrical digital data processing, etc., can solve problems such as lack of coordinate invariance, singularity margin index lacks geometric or physical meaning, etc., to improve calculation efficiency Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
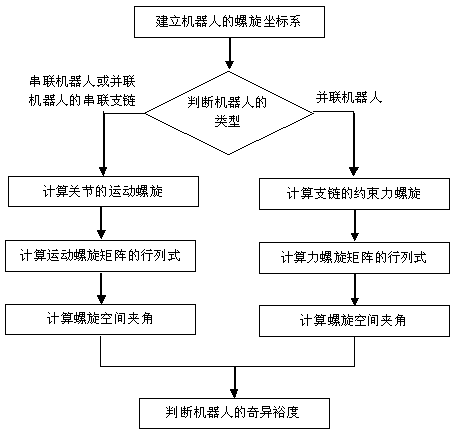
[0045] Embodiment 1: The present invention will be further described below in conjunction with a 3R planar robot. For the flow chart of robot singularity margin detection, see figure 1 shown, including the following key steps:
[0046] (1) Establish the spiral coordinate system of the robot;
[0047] (2) Calculate the joint motion spiral and form a spiral matrix;
[0048] (3) Calculate the determinant of the N-order extended spiral matrix;
[0049] (4) Calculate the determinant of the N-1 order extended spiral matrix;
[0050] (5) Calculate the included angle of the spiral space;
[0051] (6) Calculate the singularity margin of the robot.
[0052] by figure 2 The 3R planar robot mechanism is shown as an example. The 3R planar robot has 3 revolving pairs, the length of the 3 connecting rods is 0.5m, the angle between the No. 1 connecting rod and the horizontal line is 45°, the angle between the No. 2 connecting rod and the horizontal line is 0°, and the The angle betwe...
Embodiment 2
[0063] Embodiment 2: The present invention will be further described below in conjunction with the 3-UPU parallel robot. For the flow chart of robot singularity margin detection, see figure 1 shown, including the following key steps:
[0064] (1) Establish the spiral coordinate system of the robot;
[0065] (2) Calculate the joint motion spiral and form a spiral matrix;
[0066] (3) Calculate the determinant of the N-order extended spiral matrix;
[0067] (4) Calculate the determinant of the N-1 order extended spiral matrix;
[0068] (5) Calculate the included angle of the spiral space;
[0069] (6) Calculate the singularity margin of the robot.
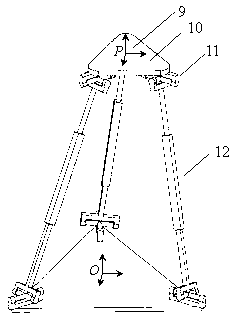
[0070] by figure 2 The 3-UPU parallel robot mechanism is shown as an example. The dynamic platform 10 of the 3-UPU parallel robot is connected to the base through three branch chains, and each branch chain is composed of two universal pairs 11 and one moving pair 12, where the moving pair is a driving joint. The three univer...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com