


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
An omnidirectional steering and lifting agricultural remote control mobile robot platform
A mobile robot and steering mechanism technology, applied in the direction of steering gear, steering mechanism, electric steering mechanism, etc., can solve problems such as difficult to realize omnidirectional steering, height adjustment, and height adjustment of the vehicle body, etc., and achieve easy and flexible steering without noise. Small, the effect of increasing the number of platforms
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
specific Embodiment approach 1
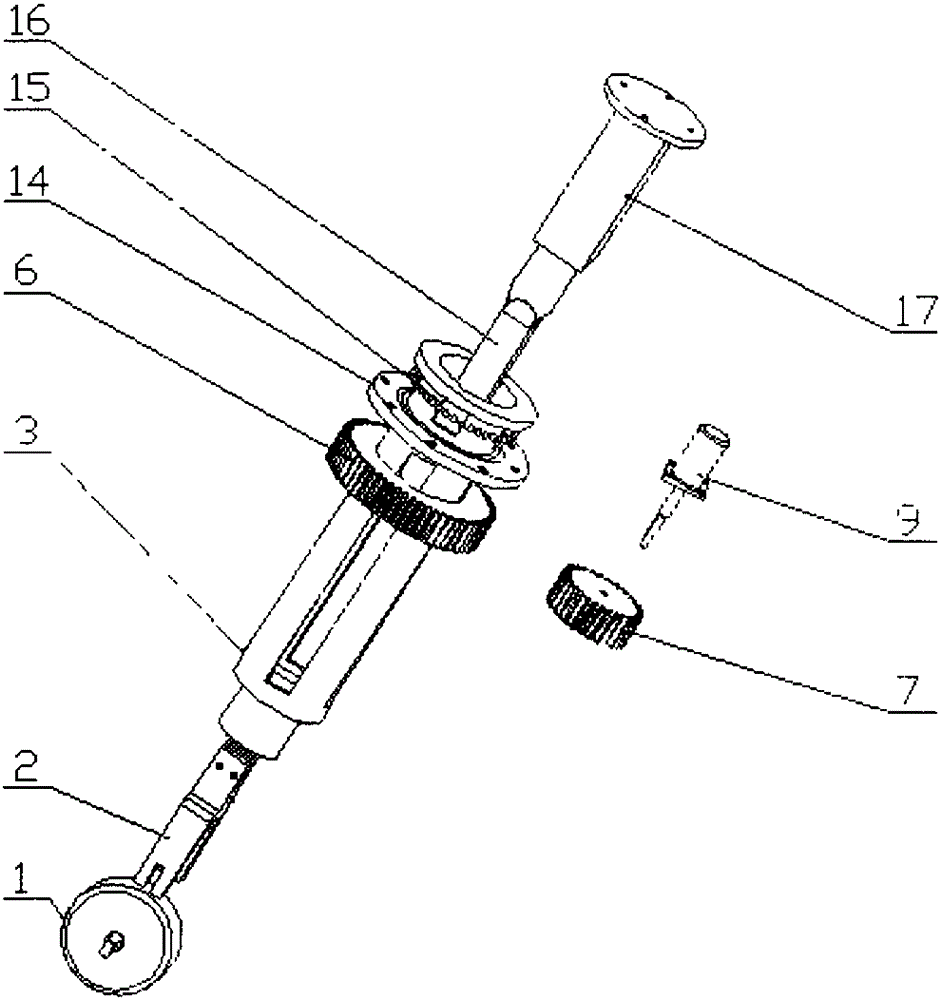
[0018] Such as figure 1 , figure 2 , image 3 and Figure 4 As shown, the servo motor 9 is connected to the vehicle frame 8 with bolts, the pinion 7 and the power output shaft of the servo motor 9 are connected by a flat key, and the pinion 7 is axially fixed with a round nut. The pinion 7 meshes with the bull gear 6 . The steering sleeve 3 is fixedly connected with the bull gear 6 . Steering sleeve 3 lower end radiuses are little, have square hole inside its lower end, and this hole slides with hydraulic cylinder plunger 16 square shaft one ends. Steering sleeve 3 middle part is hollow, so that hydraulic lifting device 6 is installed inside. Have four grooves on the side of steering sleeve 3 circumferences, so that hydraulic pipes are installed. The lower surface circumference of the upper end of the steering sleeve 3 is provided with a semicircular groove 21 for installing balls 15, and the upper surface of the end cover 14 is also provided with a corresponding semici...
specific Embodiment approach 2
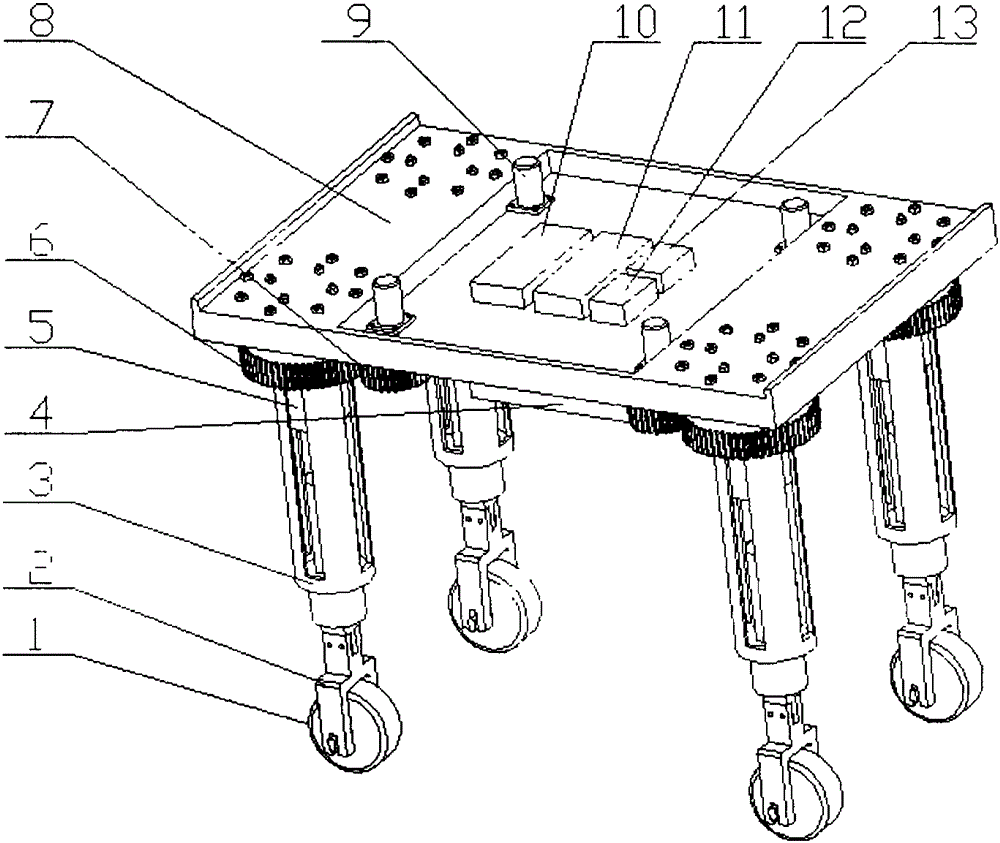
[0019] Such as figure 1 , figure 2 As shown, the vehicle electronic equipment includes: a battery pack 10 , a vehicle controller 11 , a remote control signal receiver 12 , and a wireless communication module 13 . The battery pack 10 is responsible for the power supply of the entire remote control platform; the whole machine controller 11, on the one hand, controls the movement of the mobile platform, that is, controls the start, stop and speed of the hub motor wheel 1, the rotation of the servo motor 9, the opening and closing of the solenoid valve and the hydraulic oil pump On the other hand, it realizes the exchange of signals, that is, realizes the reception and processing of input remote control signals and wireless signals, and can transmit them to remote computers and other mobile machine platforms through the wireless communication module 13 at the same time. If certain sensors and GPS are installed, it can also realize adaptive lifting and automatic navigation; the r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com