Identification method for space target rotation state based on binocular vision
A space target and rotation state technology, applied in the aerospace field, can solve problems such as the inability to guarantee the center point, the inability to identify the rotation axis and the rotation angular velocity, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment
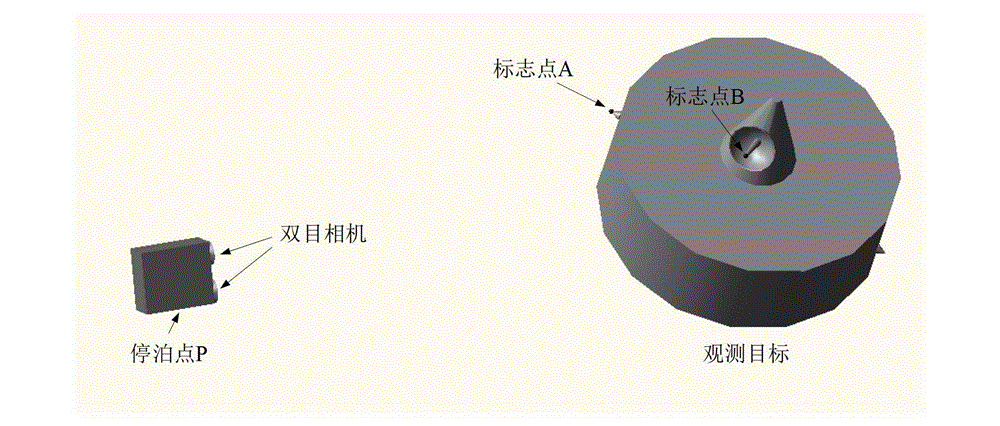
[0083] (1) Approaching the observation operation target:
[0084] Control the body equipped with a binocular camera to approach the target so that it parks at point P near the target, such as figure 1 As shown, select two marker points A and B on the target, observe the movement of the two points through the binocular camera, take ΔT=1s, the given position vector is as follows (unit: cm):
[0085] r A0 =(300,400,155.27864) T ;r B0 =(500,200,244.72136) T
[0086] r A1 =(442.68513,310.12752,102.46599) T ;
[0087] r B1 =(423.83306,162.06127,358.82704) T ;
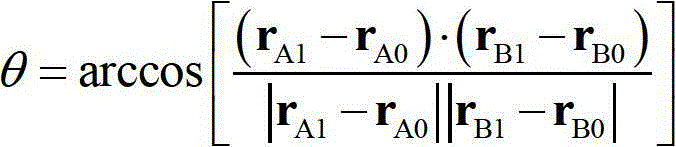
[0088] Compute the angular measure θ:
[0089]
[0090] Then satisfy |θ|>5° and |180-θ|>5°, so turn to step 2.
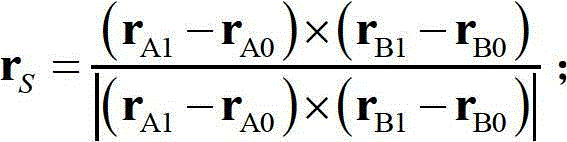
[0091] (2) Determine the direction vector of the rotation axis in the camera coordinate system:
[0092] Compute the vectors separately:
[0093] r flag =(r B0 -r A0 )×(r B1 -r A1 )=[-38028.76,-52958.39,-33383.66] T
[0094] r S = ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com