Automatic potted seedling transplanting, picking and placing method based on two mechanical fingers and four clamp pins
A plug-in seedling and automatic technology, applied in planting methods, transplanting machinery, applications, etc., can solve the problems of unavoidable damage to seedlings, poor flexibility, etc., to reduce damage to seedlings, reduce damage, and ensure the success rate of seedling picking. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
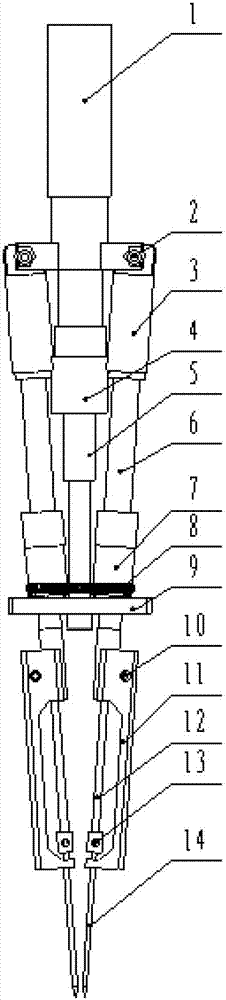
[0013] According to the size and state of the seedlings on the hole plate, adjust the hole-aligning posture and opening and closing degree of the manipulator, and then use the miniature cylinder 6 piston rod 12 to push two pairs of fork-shaped gripping needles 14 to stretch out the gripping needles from the opened mechanical fingers Limiting block 11 is inserted into pot body from both sides of seedling and grabs plug seedling, and rubber finger 4 deflates simultaneously, and two mechanical fingers pinch plug plug seedling pot body under the effect of tightening up spring 8 to realize getting seedling. When the manipulator needs to release seedlings, the rubber finger 4 is inflated, and the two mechanical fingers are stretched, so that the mechanical fingers are in an open state. At the same time, the miniature cylinder 6 piston rod 12 pushes two pairs of fork-shaped gripping needles 14 to retract the gripping needle limit Block 11, so as to reach the purpose of releasing plug ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com