Mobile robot positioning system and method based on a plurality of two-dimensional code readers
A mobile robot and positioning system technology, applied in the direction of instruments, measuring devices, surveying and navigation, etc., can solve problems affecting stability, body shaking, wobbling, etc., to achieve the effect of improving accuracy, enhancing popularity, and running smoothly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] Embodiments of the present invention are described in further detail below in conjunction with the accompanying drawings:
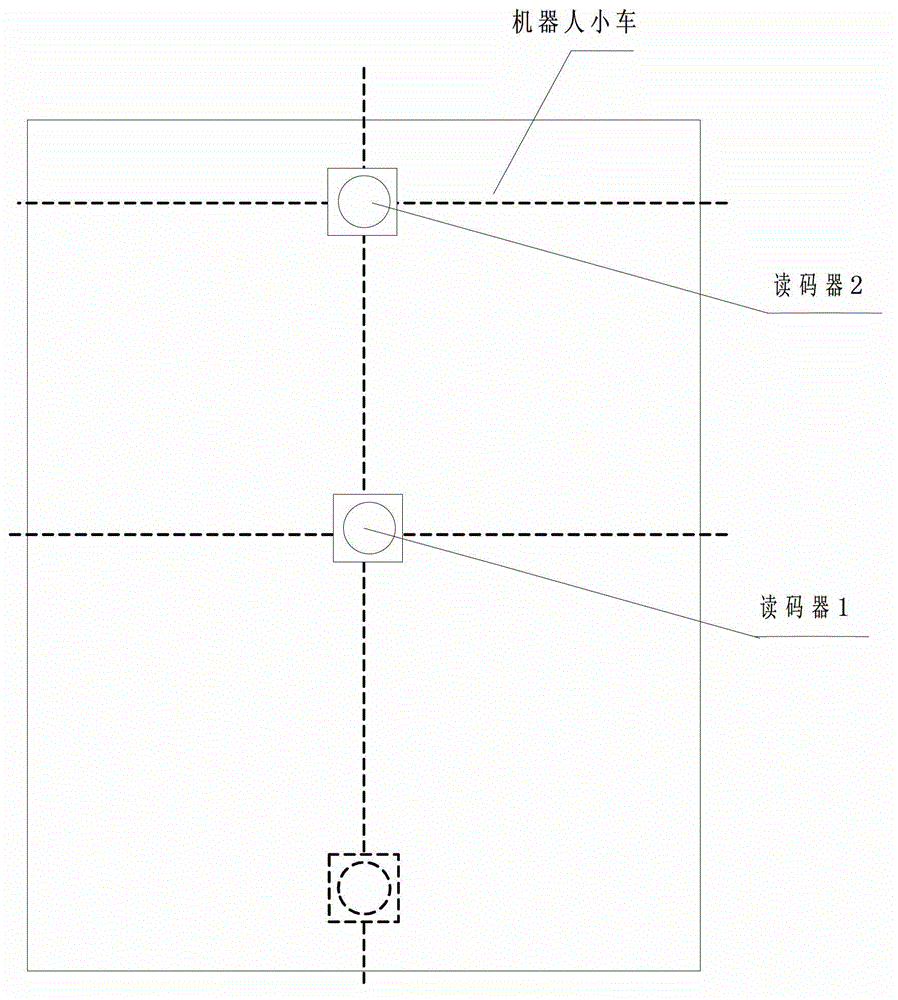
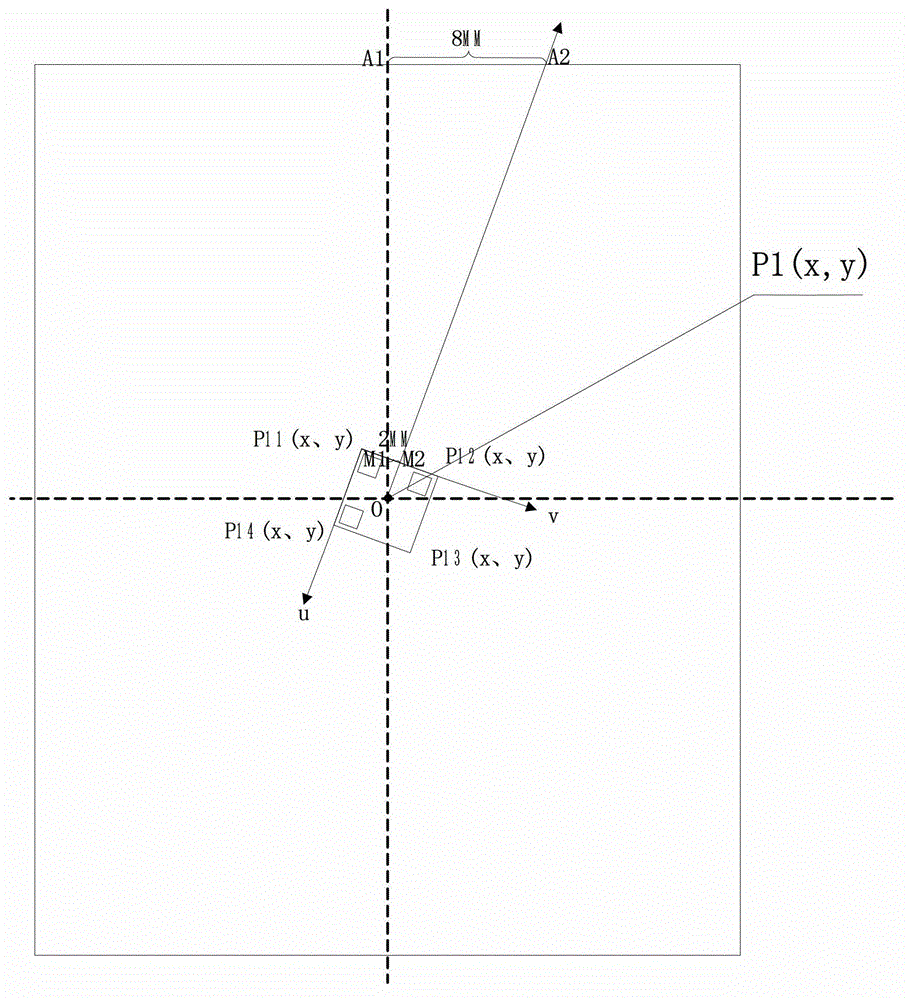
[0071] A mobile robot positioning system and method based on multiple code readers, based on the previous patent application (patent name: Mobile robot positioning system and method based on two-dimensional code, application number: 201210186563.5), the deviation calculation of the position of the car has been In the previous patent, it is explained in detail in the present invention that this is not repeated in the present invention, but only protects the content that the present invention uses two code readers to solve the posture deviation of the trolley. Therefore, this embodiment only focuses on this invention The content is explained.
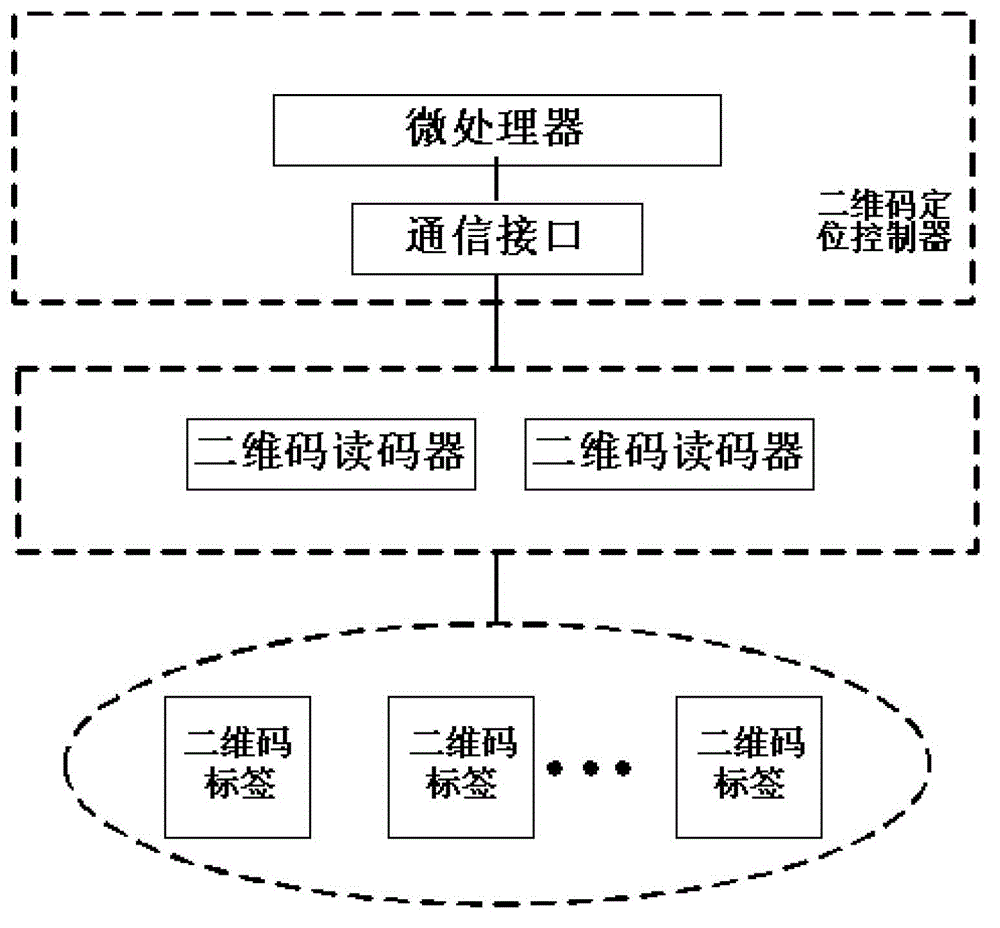
[0072] A mobile robot positioning system based on multiple two-dimensional code readers, such as figure 1 As shown, it includes a two-dimensional code positioning controller installed on a mobile robot trolle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com