Wheeled lunar vehicle driving control method based on slip ratio adjustment
A drive control and slip rate technology, which is applied in the aerospace field and can solve problems such as complex solutions, small amount of calculation, and single control target.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
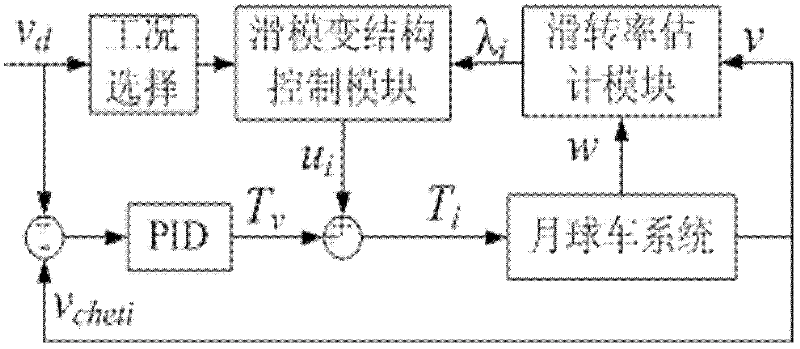
[0051] Specific embodiments of the present invention will be described in detail below in conjunction with the accompanying drawings. Such as figure 1 shown, v d is the expected travel speed of the lunar rover; v cheti is the actual traveling speed of the lunar rover body; u i is the output of the sliding mode variable structure control module; T v is the output of the PID speed control block; T i is the distribution moment of lunar rover wheel i; λ i is the estimated slip rate of wheel i; w is the angular velocity of the wheel, and v is the translational velocity of the center of mass of the wheel.
[0052] A. Working condition selection and control target determination
[0053] Step 1: Define the desired speed v of the car body d and the actual driving speed v of the car body cheti Existing relative error|(v d -v cheti ) / v d |·When 100% is less than 10%, it belongs to the uniform speed driving condition; otherwise it belongs to the acceleration or deceleration co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com