Vertical landing track design method for unmanned aerial vehicle
A design method and unmanned aerial vehicle technology, applied in the field of flight control, can solve problems such as difficulty in grasping the safety margin of the unmanned aerial vehicle, elevator control margin, aircraft accident, and the pitch angle of the unmanned aerial vehicle exceeds the safe range, so as to avoid landing precision and safety, improve maneuvering margin, improve rationality and design efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0096] The present invention will be further described in detail with reference to the accompanying drawings and embodiments.
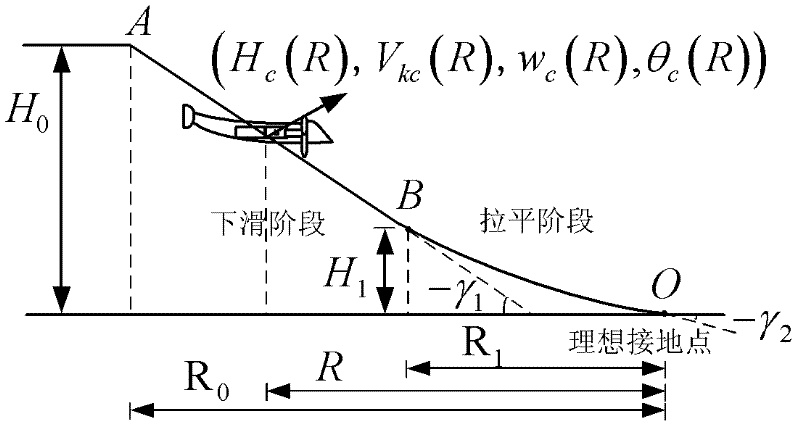
[0097] The present invention proposes a design method for the longitudinal landing trajectory of the UAV, such as figure 1 As shown, the starting point of the drone's descent is A, the starting point of leveling is B, and the ideal touchdown point is O. The height H of the sliding starting point A 0 , the height H of leveling starting point B 1 and the track angle of the glide phase γ 1 Given by the flight requirements of the drone. The height H of the ideal grounding point 2 Equal to the height of the center of gravity of the drone parked on the ground, the track angle of the ideal touchdown point γ 2 Permissible descent speed to ground according to w 2 Sure. The longitudinal landing trajectory of the drone takes the distance to fly at the current position of the drone R as an independent variable, and is determined by the altitude command H ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com