


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Polar-axis type solar automatic-tracking system for heating vacuum heat collector
A technology of automatic tracking and heat collectors, which is applied in solar heating systems, solar thermal energy, solar thermal power generation, etc., can solve the problems of increasing the power of the drive system, increasing manufacturing costs, and large wind resistance, and achieves simplified drive devices and wind resistance Enhanced performance and reduced manufacturing costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
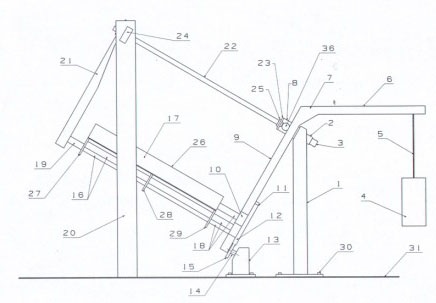
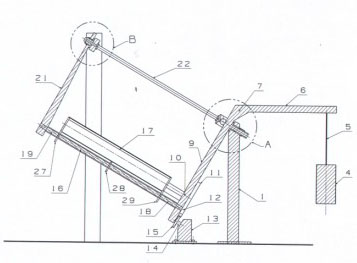
[0039] A polar axis solar automatic tracking system for heating a vacuum collector, comprising a support column 1, two columns 20, a transmission device 12 and a driving device 13. The bottom ends of the support column 1 and the two columns 20 both pass through bolts 30 Fixed on the ground 31, a self-lubricating bearing sleeve 2 is installed on the top of the support column 1, and the movable bracket 7 is composed of a cross bar 6, an inclined bar 9 and a right metal support 10, which are connected together. 9 is an obtuse angle, the right metal support 10 is fixed at the lower end of the diagonal rod, the upper end of the counterweight cable 5 is fixed to the right end of the crossbar 6, and the lower end of the counterweight cable 5 is equipped with a counterweight 4;
[0040] A cylindrical rotating shaft 3 is fixed on the right side of the top end of the inclined rod 9, and the right end of the rotating shaft 3 is inserted into the self-lubricating bearing sleeve 2 on the suppo...
Embodiment 2
[0051] The structure of embodiment 2 is basically the same as that of embodiment 1, except that:
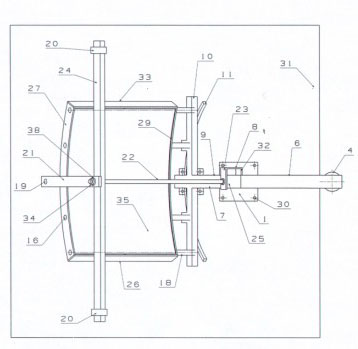
[0052] The transmission device 12 is composed of a worm 40 and a worm wheel 41. The worm wheel 41 is installed at the left end of the rotating shaft 3. The worm 40 meshing with the worm wheel 41 is fixedly connected to the output shaft 14 of the driving device 13 through an output shaft connector, and the driving device 13 is fixed. The pallet 39 is driven by the driving device 13 to drive the tracker to work by driving the worm 40 and the worm gear 41.
[0053] The driving device 13 is a stepping motor. The counterweight 4 is a stone.
Embodiment 3
[0055] The structure of Embodiment 3 is basically the same as that of Embodiment 1, except that:
[0056] The transmission device 12 is composed of a piston rod 42 and a guide sleeve 43. The driving device 13 is fixed on the support plate 39. Driven by the driving device 13, the hydraulic cylinder in the guide sleeve 43 generates pressure, and the pressure makes the piston rod 42 in The guide sleeve 43 makes a linear movement back and forth to push the trough cylindrical mirror 35 to rotate.
[0057] The driving device 13 is a stepping motor, the stepping motor, the piston rod 42 and the guide sleeve 43 together constitute an electro-hydraulic push rod, and the counterweight 4 is a metal block.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com