Parallel piezoelectric micromotion platform
A micro-movement platform, piezoelectric technology, applied in the direction of piezoelectric device/electrostrictive device, piezoelectric device or electrostrictive device parts, device parts, etc., can solve the problem of heavy mass, low natural frequency, Displacement sensor installation limitations and other issues, to achieve the effect of small mass, high natural frequency, and large overall stiffness
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
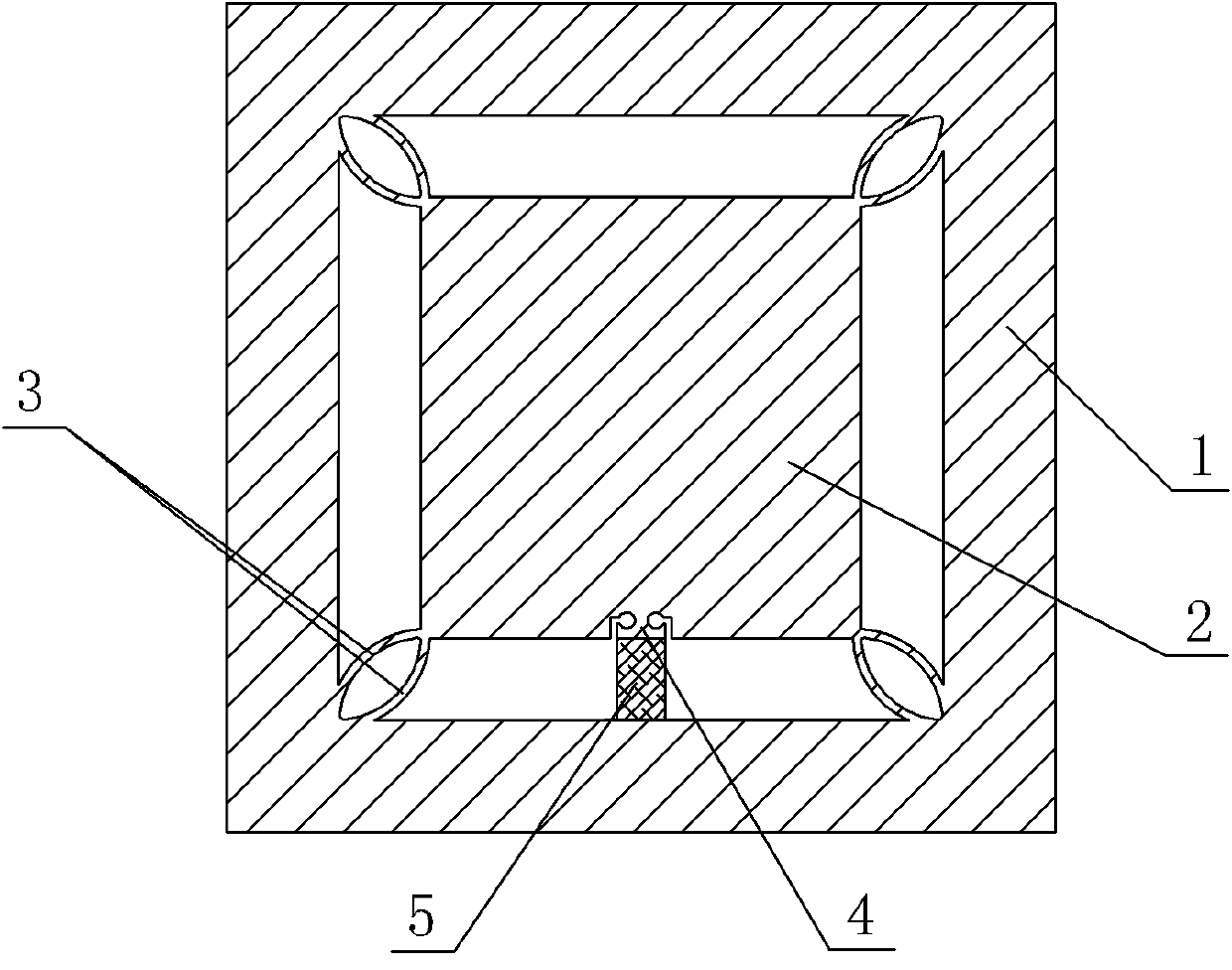
[0025] Embodiment one: if image 3 As shown, a parallel piezoelectric micro-moving platform includes a platform body 1 and a moving platform 2, the moving platform 2 is arranged in the platform body 1, and the four right angles between the platform body 1 and the moving platform 2 are integrally provided with elastic deformation Body 3, the elastic deformation body 3 is composed of two arc-shaped elastic thin plates with the same radius and arc length, which are convex and concave, and the two ends of the arc-shaped elastic thin plates are respectively at right angles to the inner part of the platform body 1, The outer right angle of the moving platform 2 is integrally connected, and one side of the moving platform 2 is provided with a guide hinge 4, the guide hinge 4 is arranged at the exact center of the side, and the inner surface of the table body 1 facing the guide hinge 4 A piezoelectric ceramic actuator 5 is fixedly arranged therebetween, and the cross section of the gu...
Embodiment 2
[0027] Embodiment two: if Figure 4 As shown, the other structures are the same as those in Embodiment 1, except that two guide hinges 4 at the same height are arranged on one side of the moving platform 2, and the two guide hinges 4 are symmetrical about the vertical bisector A-A of the side.
[0028] In this embodiment, when the piezoelectric ceramic actuator 5 on the left is elongated and deformed under the action of the driving voltage and the piezoelectric ceramic actuator 5 on the right is not affected by the driving voltage, the moving platform 2 passes through its top. The vertical line at the center of the surface (or bottom surface) produces a one-dimensional clockwise rotation micro-displacement; when the piezoelectric ceramic actuator 5 on the right is elongated and deformed under the action of the driving voltage, the piezoelectric ceramic actuator 5 on the left is When the driving voltage acts, the moving platform 2 generates a one-dimensional counterclockwise ro...
Embodiment 3
[0029] Embodiment three: as Figure 5 As shown, the other structures are the same as those in Embodiment 1, except that a guide hinge 4 is respectively provided on two mutually perpendicular sides of the moving platform 2, and the guide hinge 4 is arranged at the exact center of the side where it is located.
[0030] In this embodiment, when the two piezoelectric ceramic actuators 5 are respectively elongated and deformed under the action of the driving voltage, the moving platform 2 produces a two-dimensional translational micro-displacement along the driving direction.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com