Rapid path planning method and enhancement method for random route map
A fast path and road map technology, applied to road network navigators, etc., can solve problems such as path finding failure, easy omission, and incomplete road map, so as to reduce the probability of feasible paths, solve the problem of insufficient number distribution, and improve connectivity sexual effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention provides a fast path planning method and an enhancement method of a random roadmap, which can solve the problem that the general PRM method generates uniform free nodes with complete equal probability, resulting in insufficient number of free nodes distributed in difficult areas, thereby missing some feasible paths. .
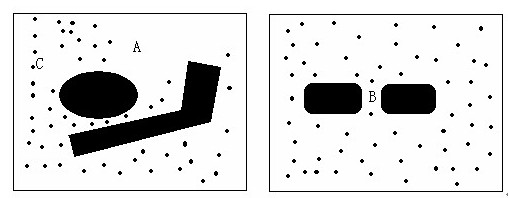
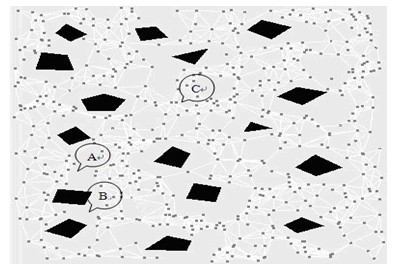
[0025] The technical solution of the present invention will be described in detail below in conjunction with the accompanying drawings. As an example, assuming that in a certain planning space, it includes A region (open area), B region (narrow passage region), C region (normal region) and obstacle region, now it is necessary to designate two areas in the planning space To generate a feasible path between points, the following approach can be adopted:
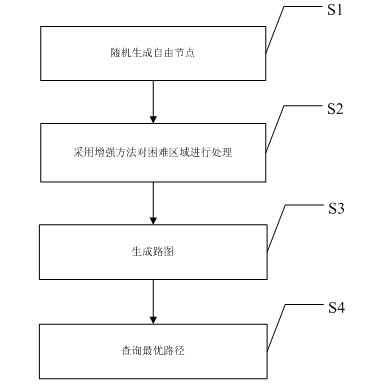
[0026] Step S1, randomly generating free nodes in the planning space area;
[0027] Step S2, using an enhancement method to process difficult areas;
[0028] Step S3, generating a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com