Dismountable modularized in-parallel robot
A robot and modular technology, applied in the field of robots, can solve the rare problems of parallel robots, and achieve the effect of easy reorganization and disassembly
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
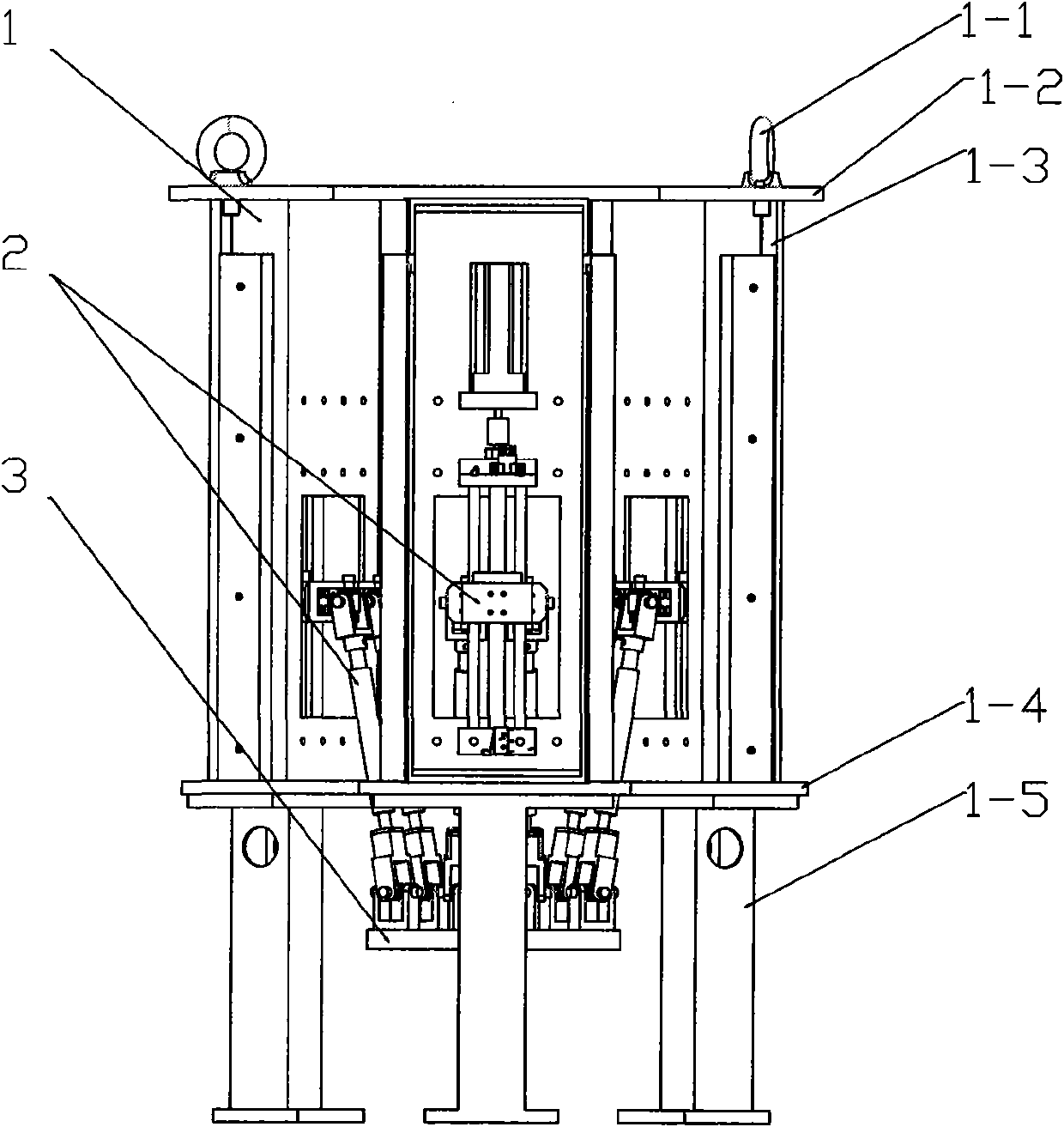
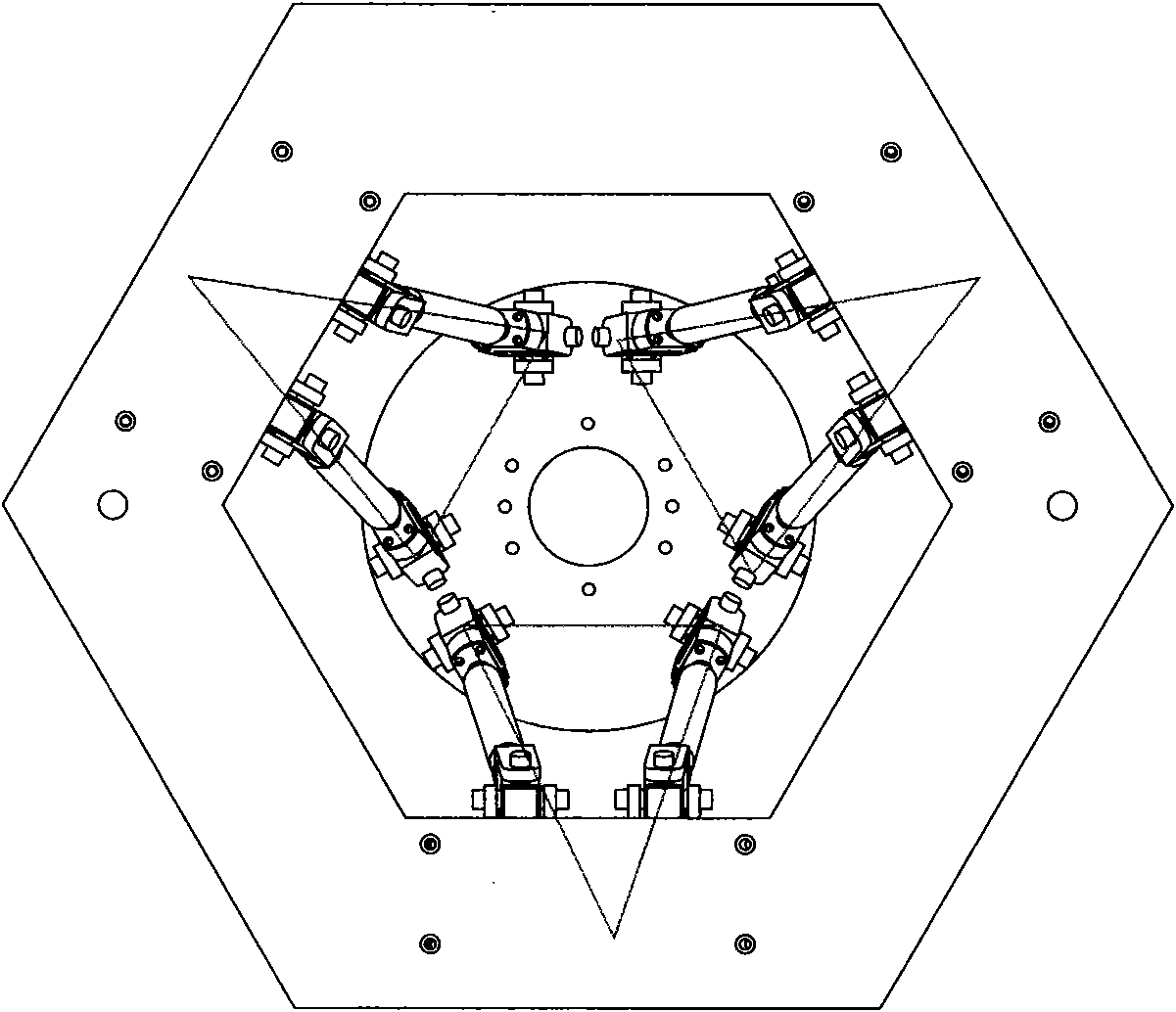
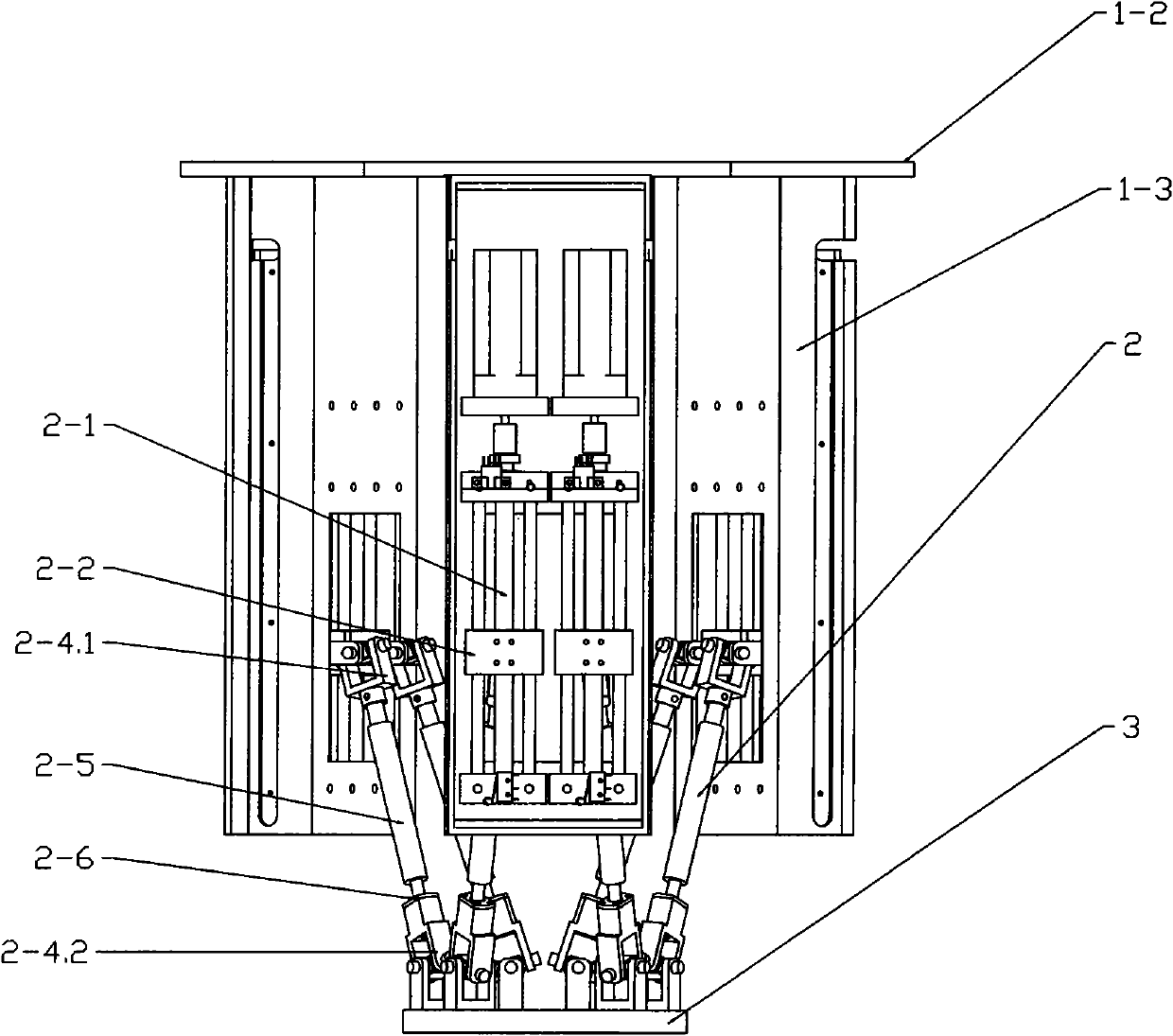
[0023] Such as figure 1 with figure 2 A detachable modularized parallel robot is shown, the robot includes a static platform module 1, the interior of the static platform module 1 is provided with a motion branch chain module 2, and the lower end of the motion branch chain module 2 is connected to the motion platform module 3, and the movement An end effector module 4 is provided on the platform module 3; the stationary platform module 1 includes a stationary platform 1-2, an eyebolt 1-1 is provided above the stationary platform 1-2, and a column 1-3 is provided below, and the column 1 A lower installation platform 1-4 is provided below the -3, and a support foot 1-5 is provided below the lower installation platform 1-4. Through the connection of standard parts, the motion branch chain modules of different specifications can be obtained by changing the combination of each sub-module of the motion branch chain module, and then constitute two typical parallel structure robots....
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com