Fusion method of multi-robot three-dimensional geometrical map
A technology of three-dimensional geometry and fusion method, which is applied in the field of fusion of geometric maps created by multi-robots, can solve the problems of two-dimensional map fusion and does not consider the geometric characteristics of the map, and achieve the effect of improving accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The present invention will be described in detail below in conjunction with the embodiments and accompanying drawings, but the present invention is not limited thereto.
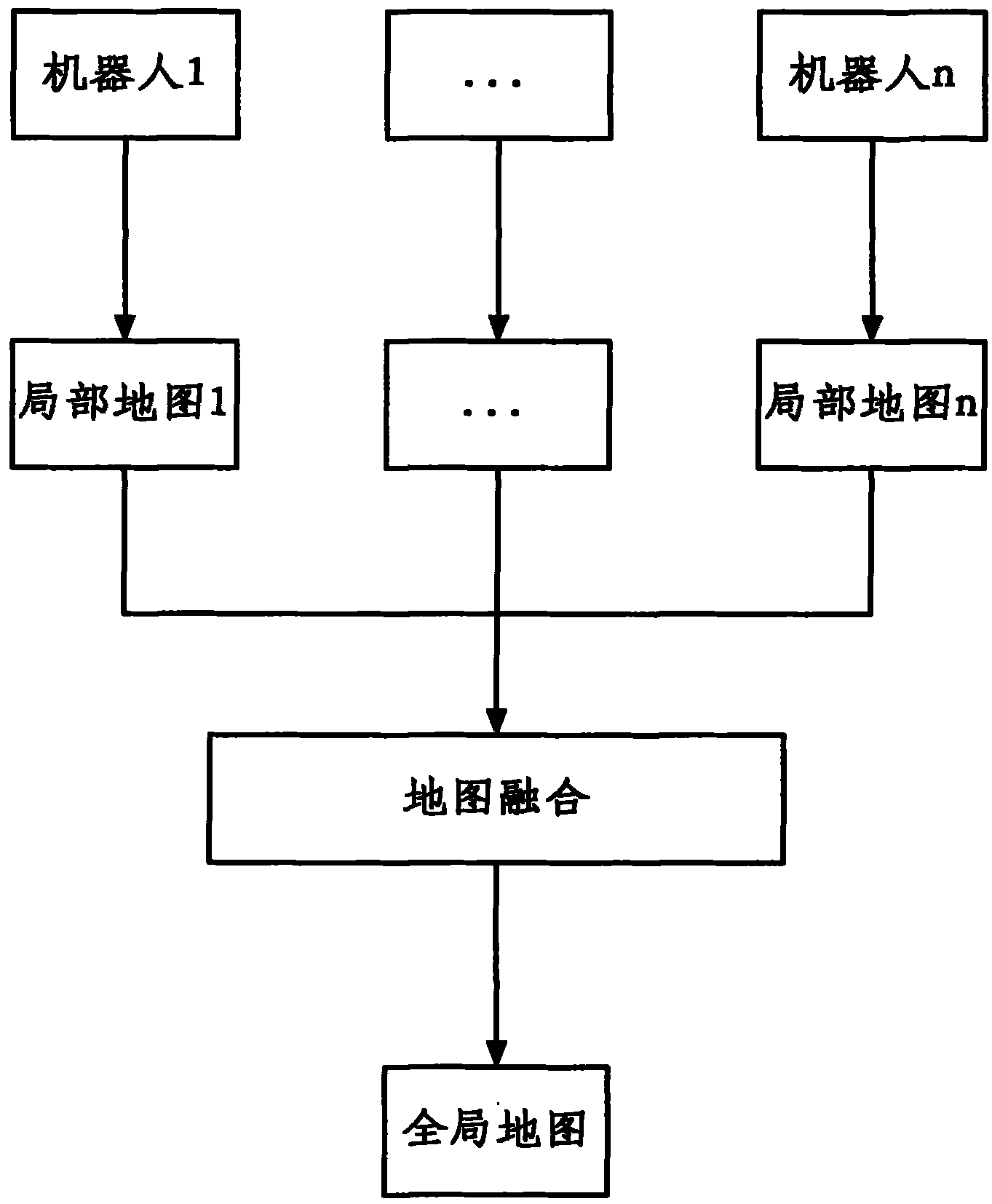
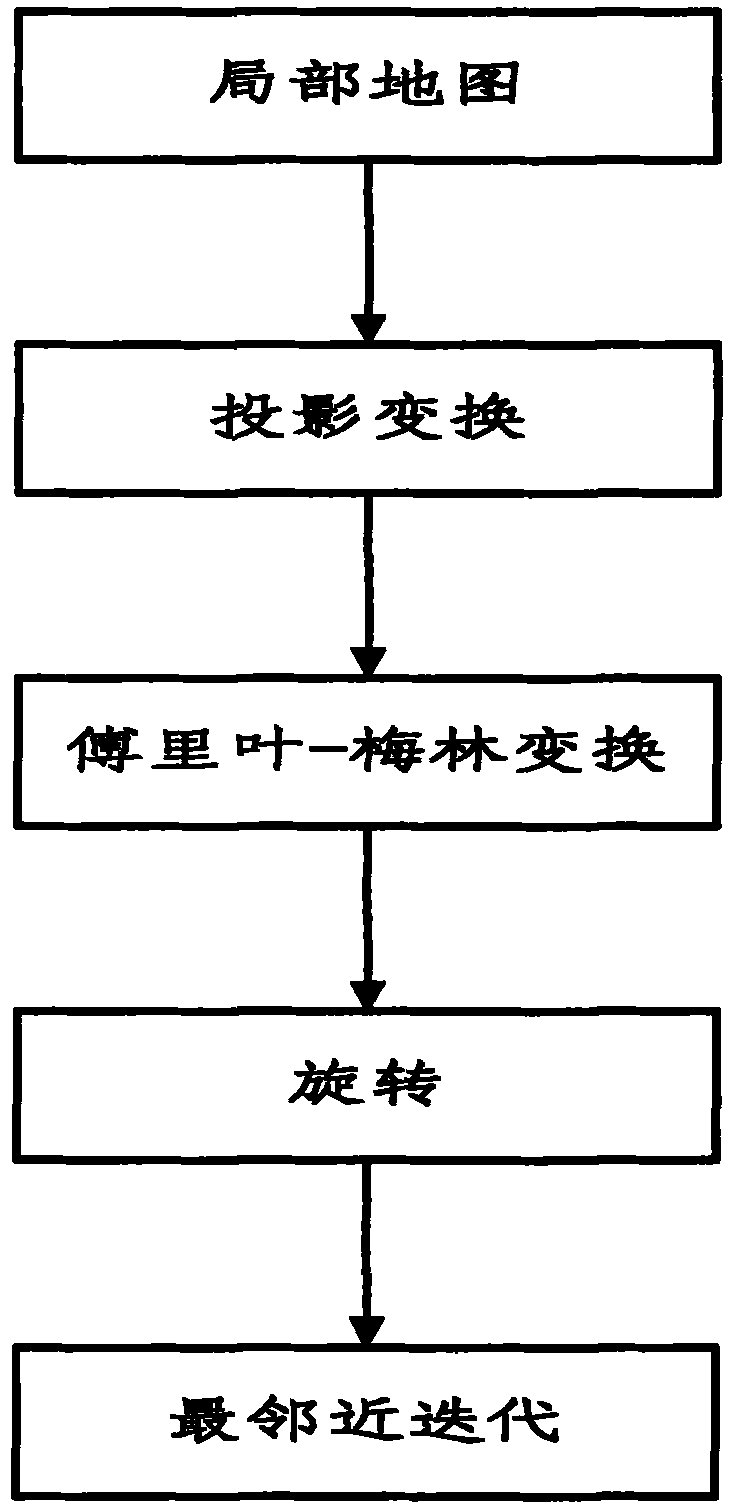
[0022] Such as figure 2 As shown, a multi-robot 3D geometric map fusion method uses visual sensors to sense the environment for multiple robots, and respectively creates a local 3D geometric map of the environment for fusion. The process includes the following steps:
[0023] Considering that the robot is moving on the x-y plane, define the dimensionality reduction mapping (ie projection model)
[0024] f: (x, y, z) → (x, y)
[0025] Where (x, y, z) is the spatial coordinate of the geometric feature, and (x, y) is the plane coordinate of the geometric feature.
[0026] Two 3D geometric maps M to be fused 1 (x, y, z) and M 2 (x, y, z) is projected onto the x-y plane for dimensionality reduction, and then the map projected onto the x-y plane is rasterized with a fixed size to obtain two grid maps m ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com