Walking aid functional electrical stimulation precision control method based on ant colony fuzzy controller
A technology of functional electrical stimulation and fuzzy controller, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve problems such as lack of experience and knowledge
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
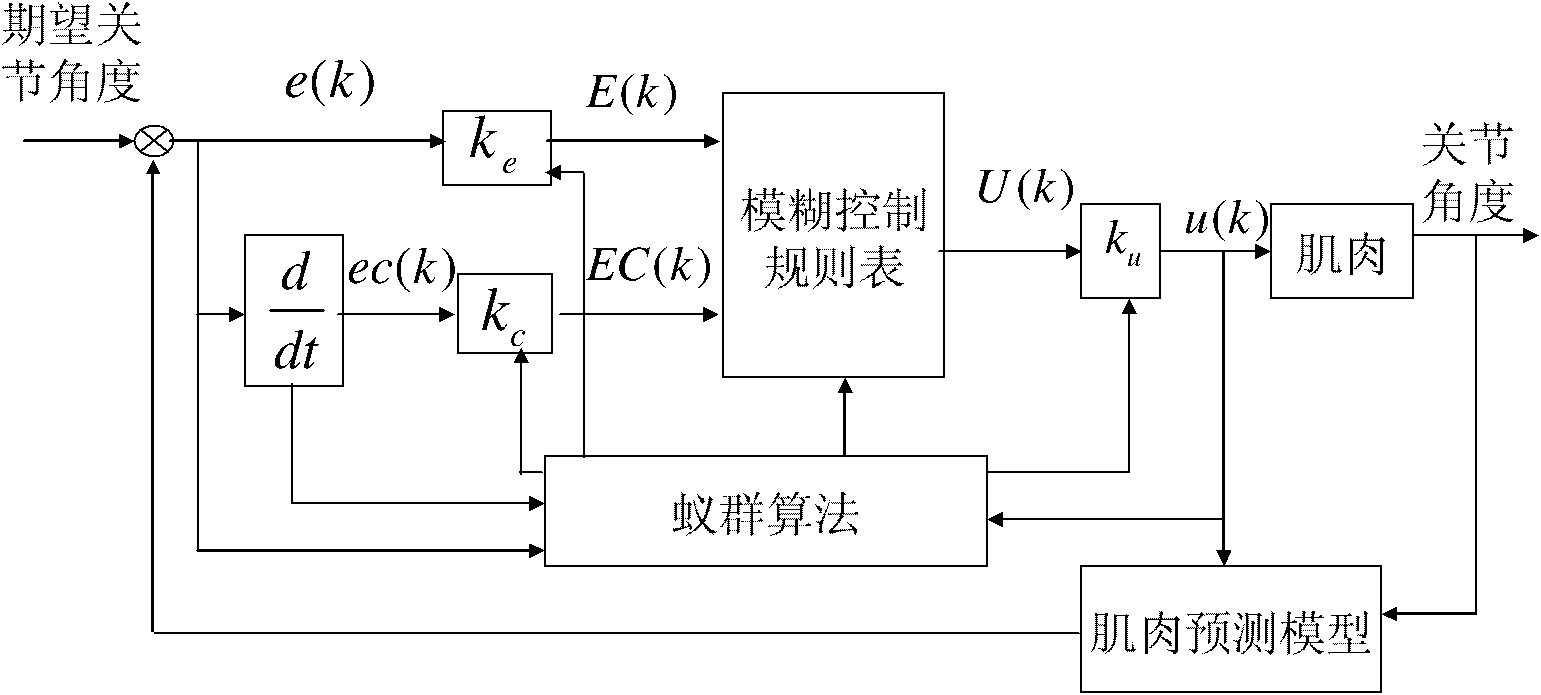
[0070] A new method of adaptively tuning fuzzy controller (Fuzzy Controller) parameters by Ant Algorithm (Ant Algorithm) is proposed to precisely control the current mode of Functional Electrical Stimulation (FES). The technical process is: optimize the membership function, quantization factor and scale factor of the fuzzy controller through self-adjustment of the ant colony algorithm, and then control the current mode of the FES system. This method is a brand-new precise control technology of functional electrical stimulation.
[0071] The structure of the application of the precise control method of walking aid functional electrical stimulation based on ant colony fuzzy controller is as follows: figure 1 shown. The workflow is as follows: first, the selection of 12 decision variables of the quantization factor, scale factor and membership function parameters of the fuzzy controller is transformed into a combinatorial optimization problem suitable for the ant colony algorith...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com