Decoupling control method for relative orbits and attitudes of formation satellites
A technology of relative orbit and decoupling control, applied in attitude control, three-dimensional position/course control, etc., can solve the problems of high control dimension, large calculation amount and low solution efficiency of formation satellites, so as to improve solution efficiency and reduce control The effect of dimensionality
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
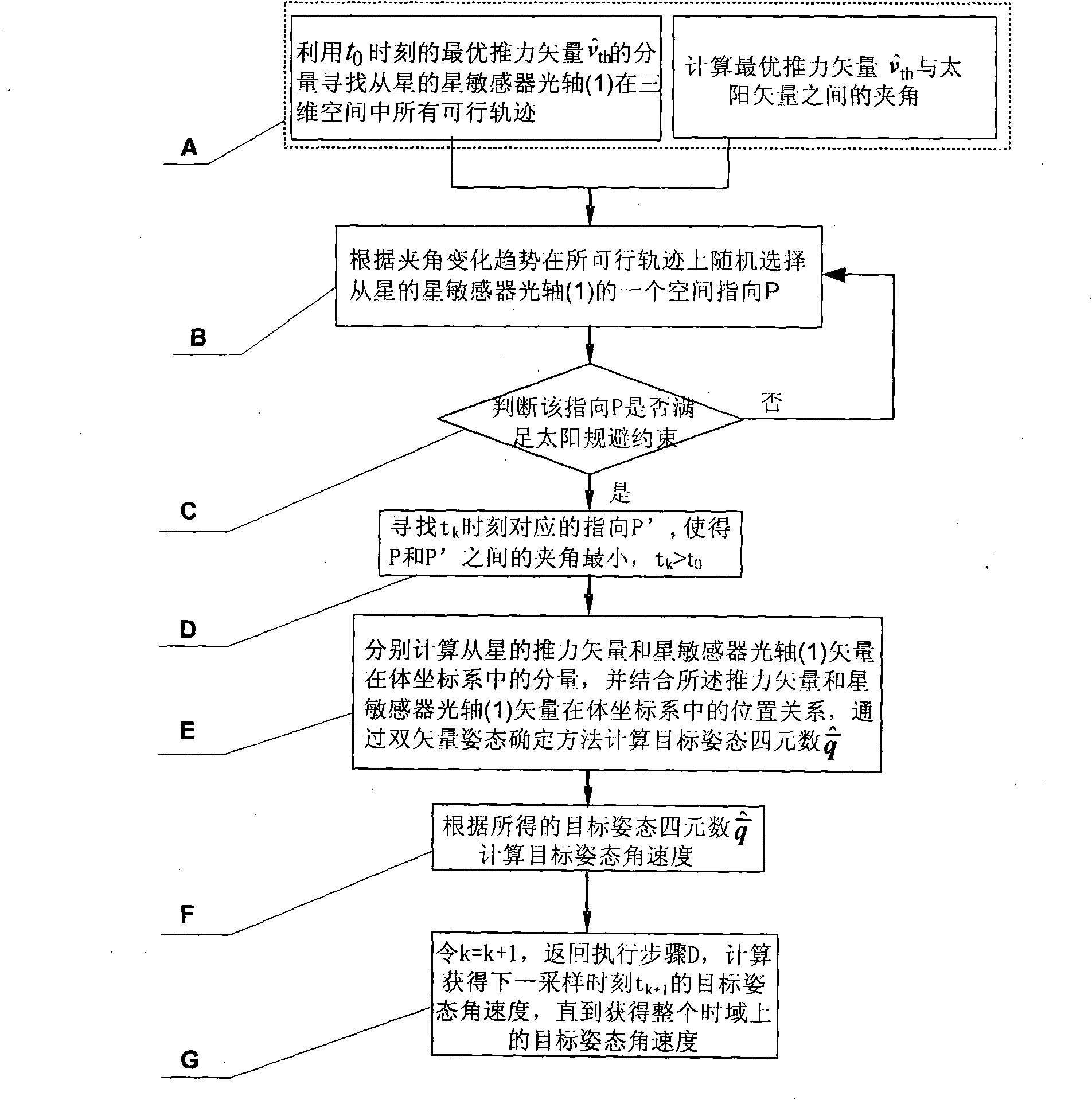
[0013] Specific implementation mode one: according to the instructions attached figure 1 and 3 Specifically explaining this embodiment, the decoupling control process of the relative orbit and attitude decoupling control method of a formation satellite described in this embodiment is:
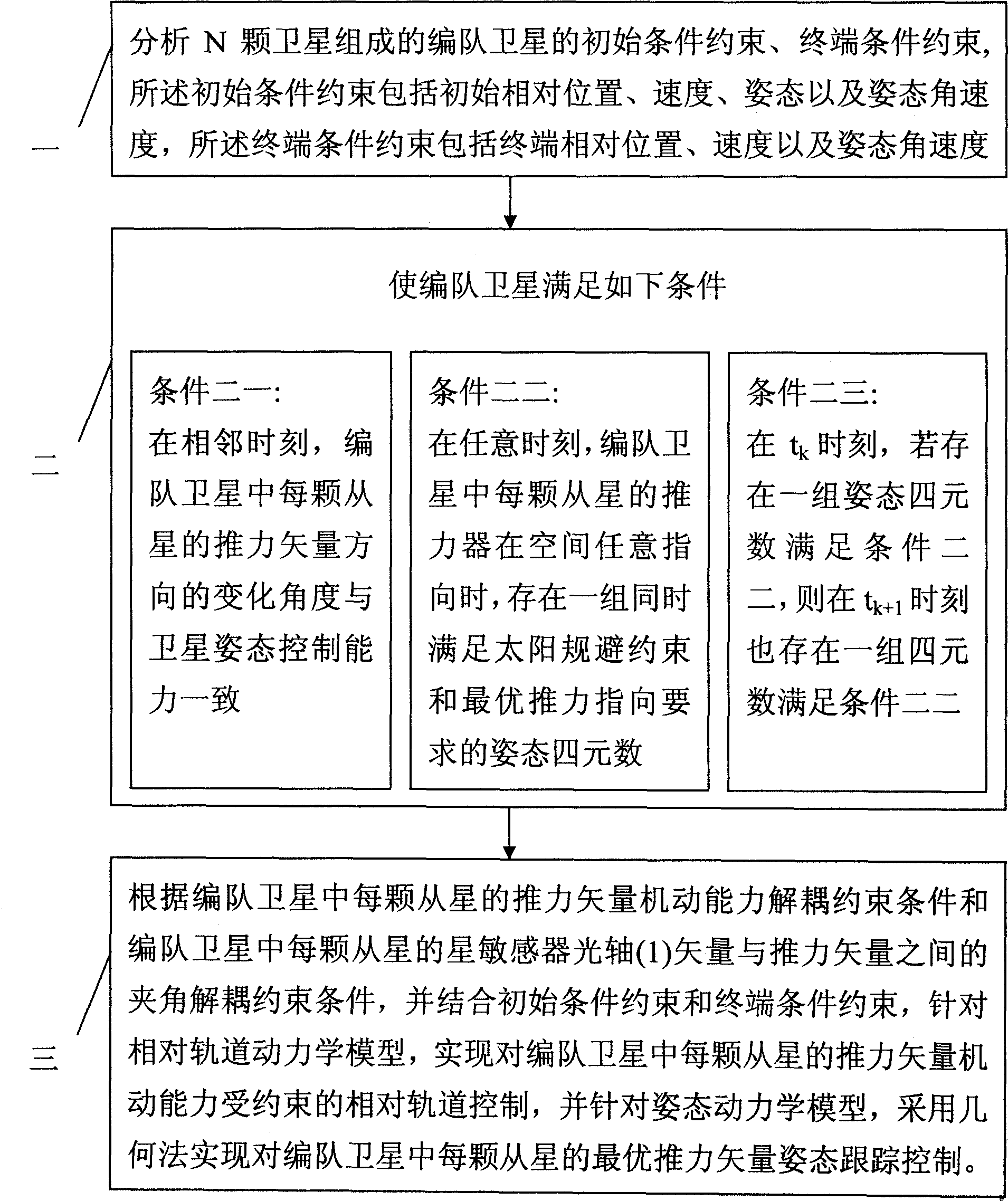
[0014] Step 1, analyzing the initial condition constraints and terminal condition constraints of the formation satellites composed of N satellites, the initial condition constraints include initial relative position, velocity, attitude and attitude angular velocity, and the terminal condition constraints include terminal relative position, velocity and attitude angular velocity;
[0015] Step 2, make the formation satellite meet the following conditions:
[0016] Condition 21. At adjacent moments, the change angle of the thrust vector direction of each slave satellite in the formation satellite is consistent with the attitude control capability of the satellite;
[0017] Condition 22. At any...
specific Embodiment approach 2
[0021] Specific embodiment two: This embodiment is a further description of the relative orbit and attitude decoupling control method of the formation satellites described in the specific embodiment one. The decoupling constraints of thrust vector maneuverability are: a T (k)a(k-1) / (‖a(k)‖·‖a(k-1)‖)≥cos(γ·ω max Δt), that is, the angle between the thrust vectors of each satellite in the formation satellite at two adjacent moments is less than or equal to the maximum angle achieved by the attitude maneuver of each satellite in the formation satellite, where a(k-1) and a(k) respectively represents the thrust acceleration vector of the slave star at k-1 time and k time, k is a natural number, ω max is the maximum attitude angular velocity achieved by the satellite, Δt is the control sampling time, and the thrust vector maneuver constraint weight coefficient γ∈(0,1).
[0022] The thrust vector maneuver capability decoupling constraint described in this embodiment is the thrust ve...
specific Embodiment approach 3
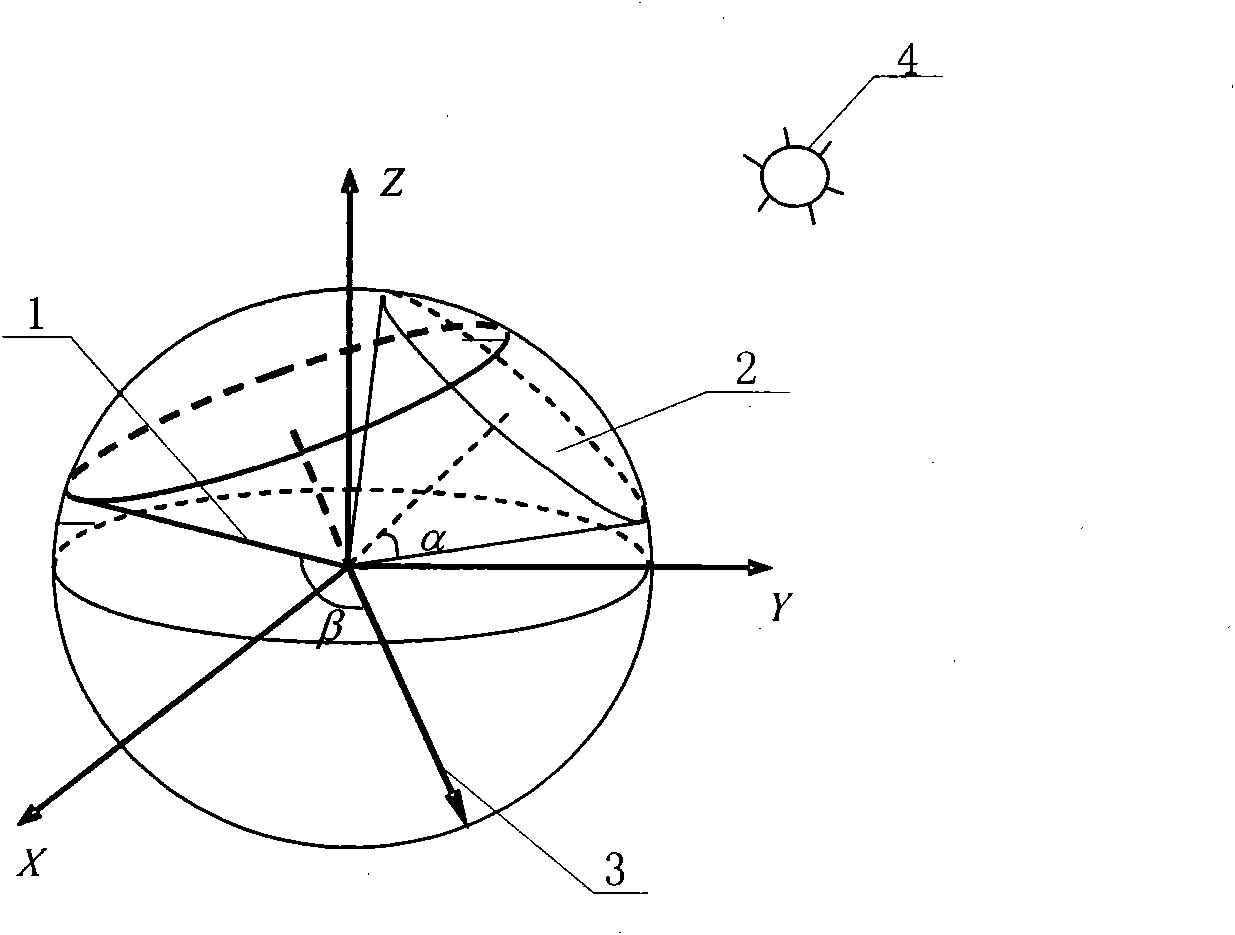
[0023] Embodiment 3: This embodiment is a further description of the relative orbit and attitude decoupling control method of the formation satellites described in Embodiment 1. The angle decoupling constraint between the star sensor optical axis 1 vector and the thrust vector is: from the star sensor optical axis 1 vector v cam with thrust vector v th The angle β between them is greater than or equal to v sun with v cam The minimum allowable angle α between, and is less than or equal to the supplementary angle of α, the v sun represents the sun vector, the v cam Denotes the star sensor optical axis vector from the star.
[0024] In this embodiment, the orientation of the optical axis 1 of the star sensor satisfying the sun avoidance constraint in space is determined by the thrust vector arbitrarily oriented from the space of the star.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com