Acquisition method of large scene based on line laser
An acquisition method, line laser technology, applied in the field of three-dimensional scanning, can solve the problems of prolonging the calibration time and errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
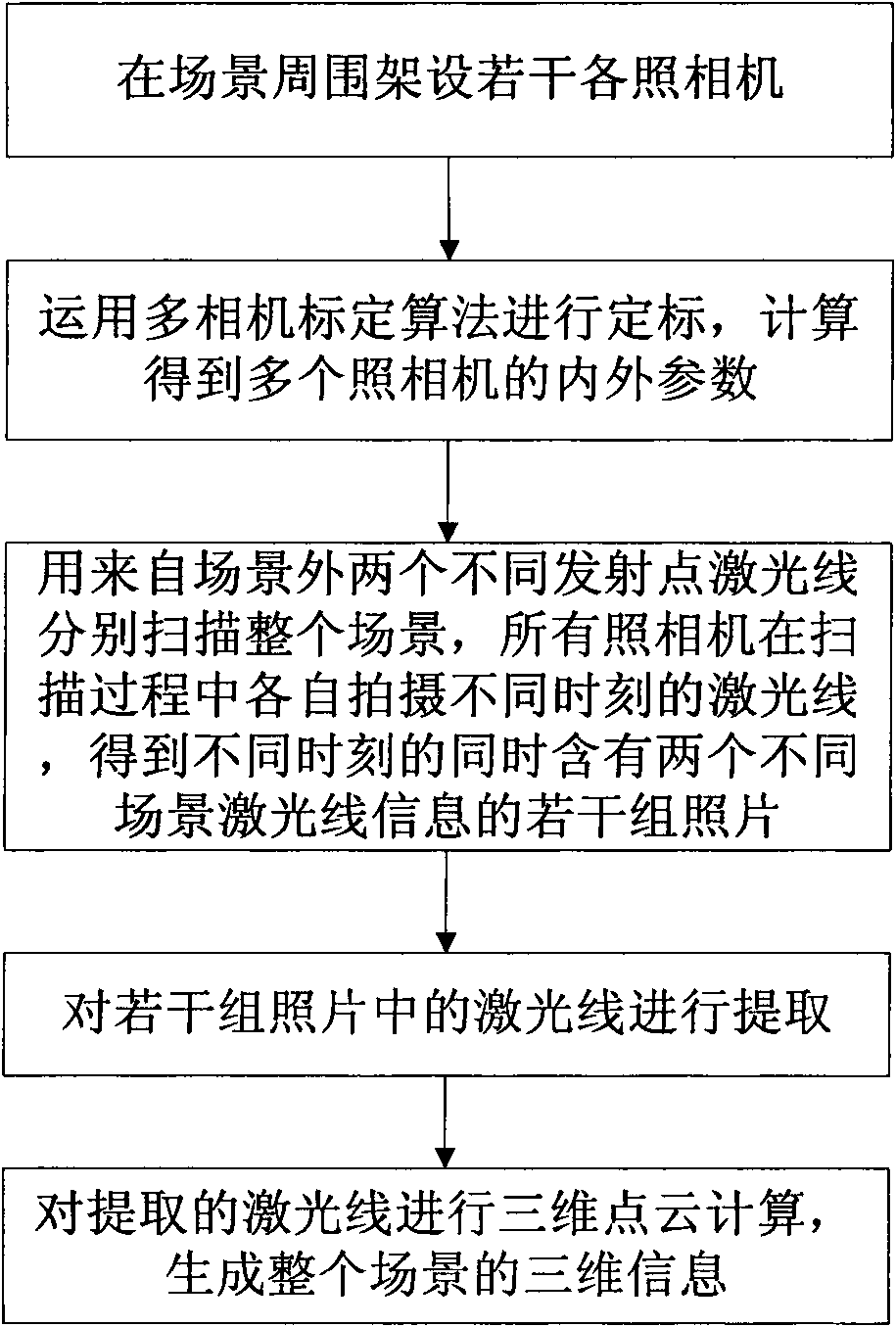
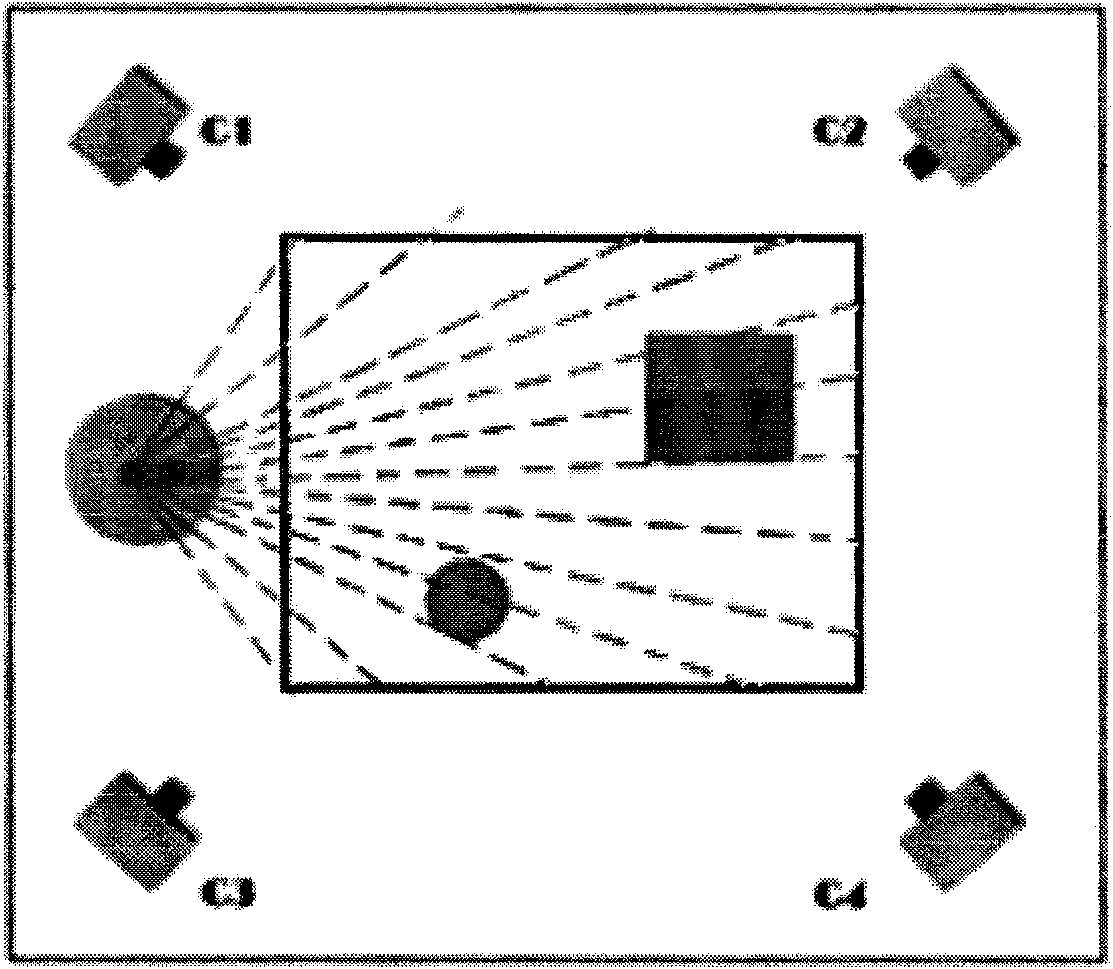
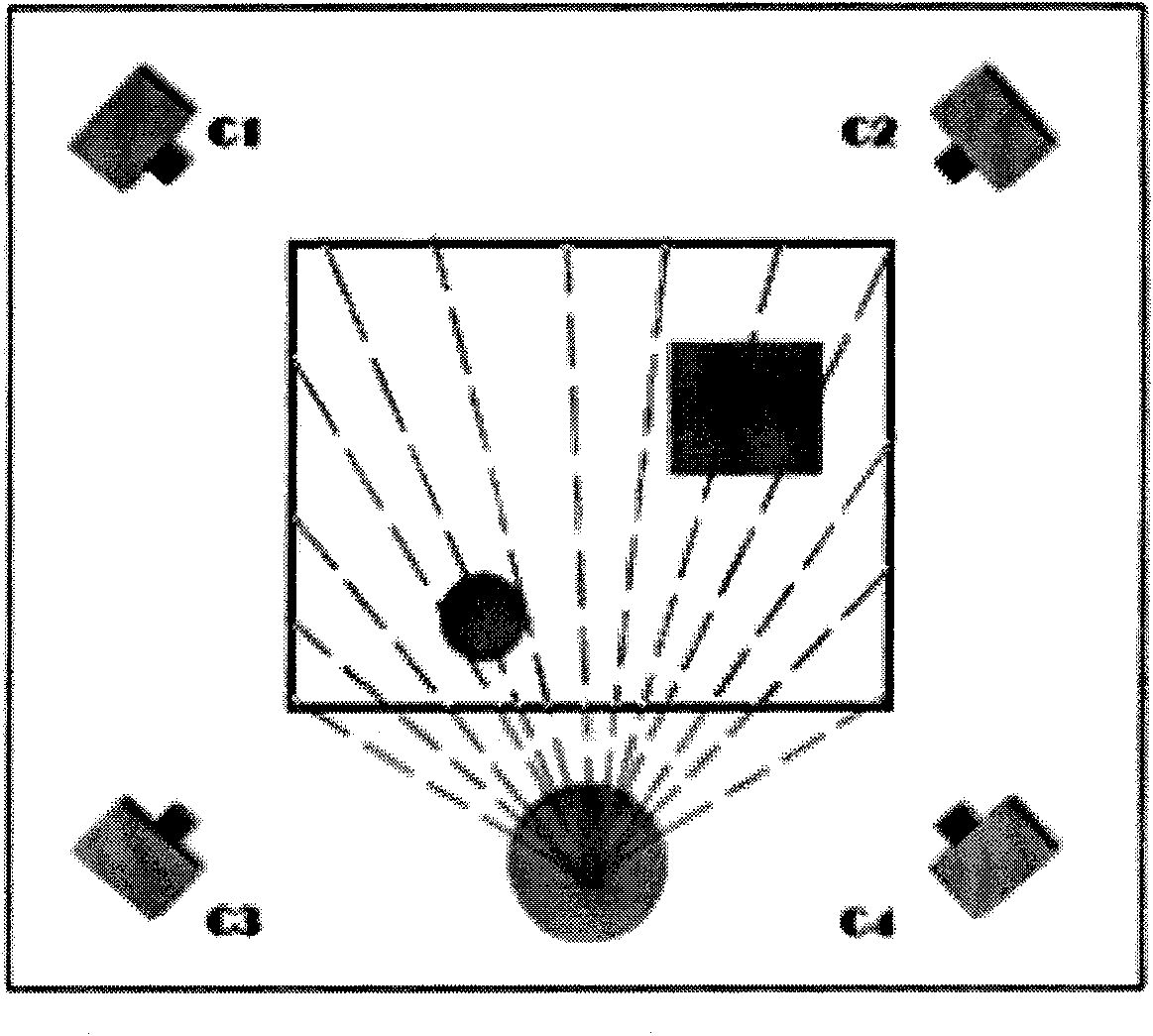
[0043] The present invention is a large-scale scene acquisition method based on line laser, such as figure 1 As shown, it includes the following steps: 1. Set up several cameras around the scene; 2. Use the multi-camera calibration algorithm proposed by Tomas Svoboda to perform multi-camera calibration, and calculate the internal and external parameters of multiple cameras in the scene; 3. Use the camera from the scene The laser line A of the outer emission point A scans the entire scene, and all cameras take pictures of the laser line A at different times during the scanning process, and obtain several photos respectively; 4. Change the laser line emission point and use the laser line from the outer emission point B of the scene B scans the entire scene, and all cameras take pictures of the laser line B at different times during the scanning process, and obtain several photos; for the same camera, take each photo obtained in step 3 and the photo corresponding to it in step 4 as ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com