Multiple video cameras synchronous quick calibration method in three-dimensional scanning system
A multi-camera, calibration method technology, applied in image analysis, image data processing, instruments, etc., can solve the problems of high manufacturing requirements, complex manufacturing, and inability to achieve simultaneous and rapid calibration of multiple camera parameters.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
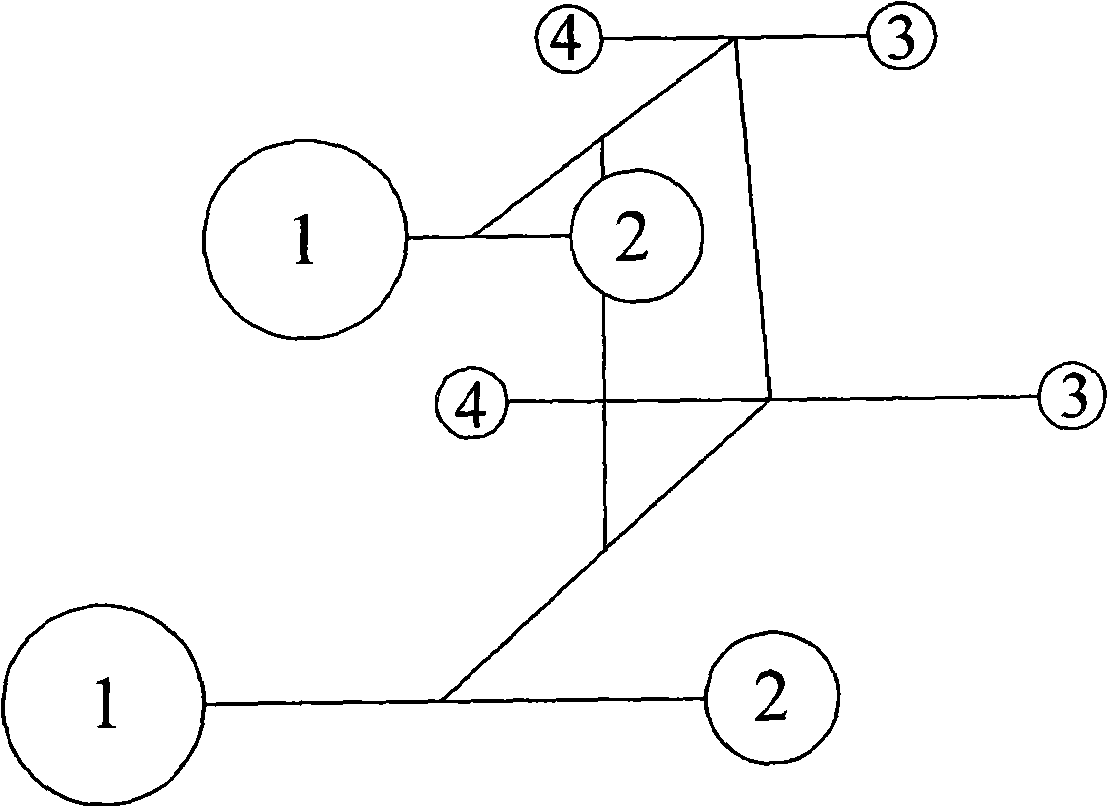
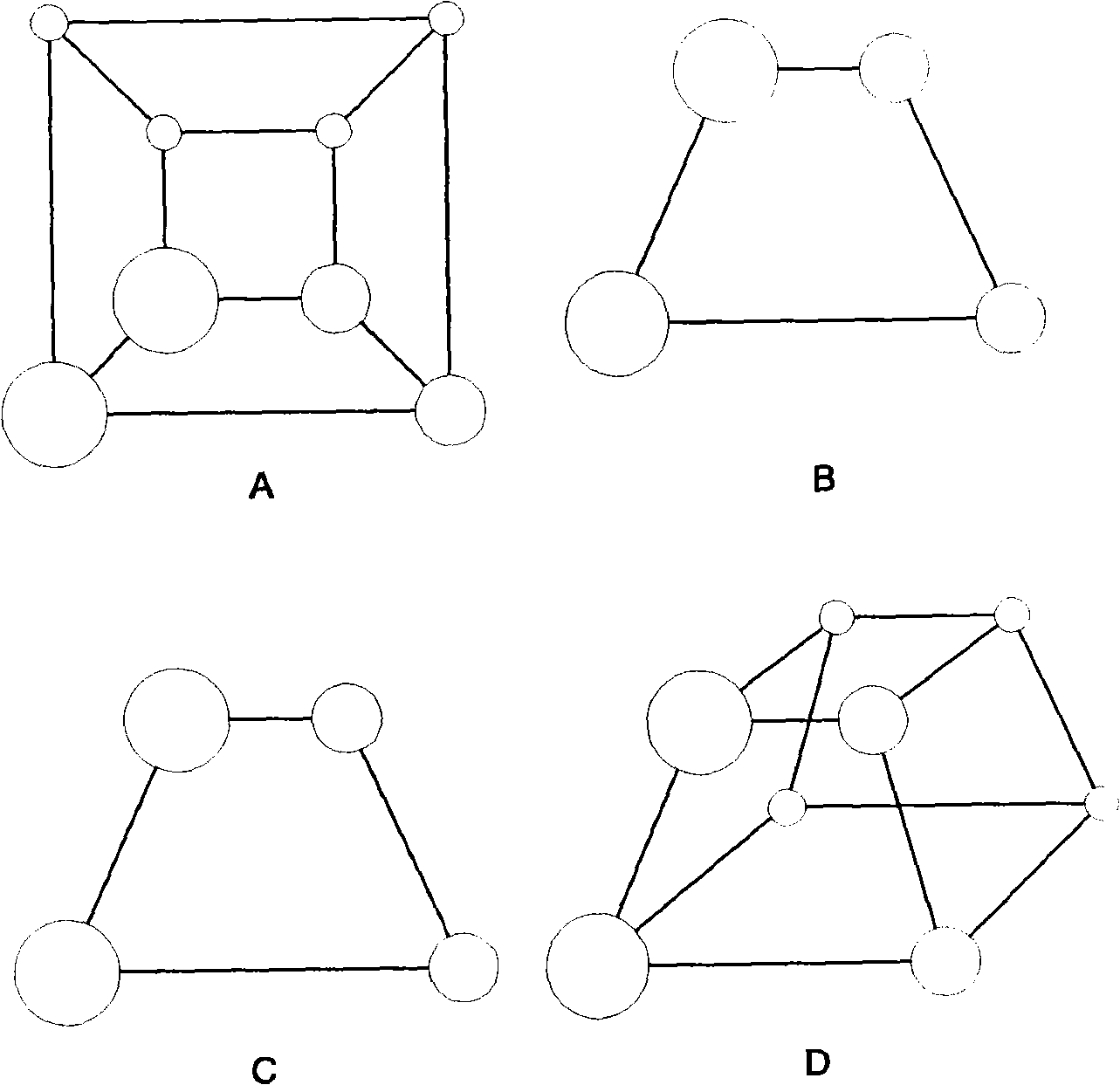
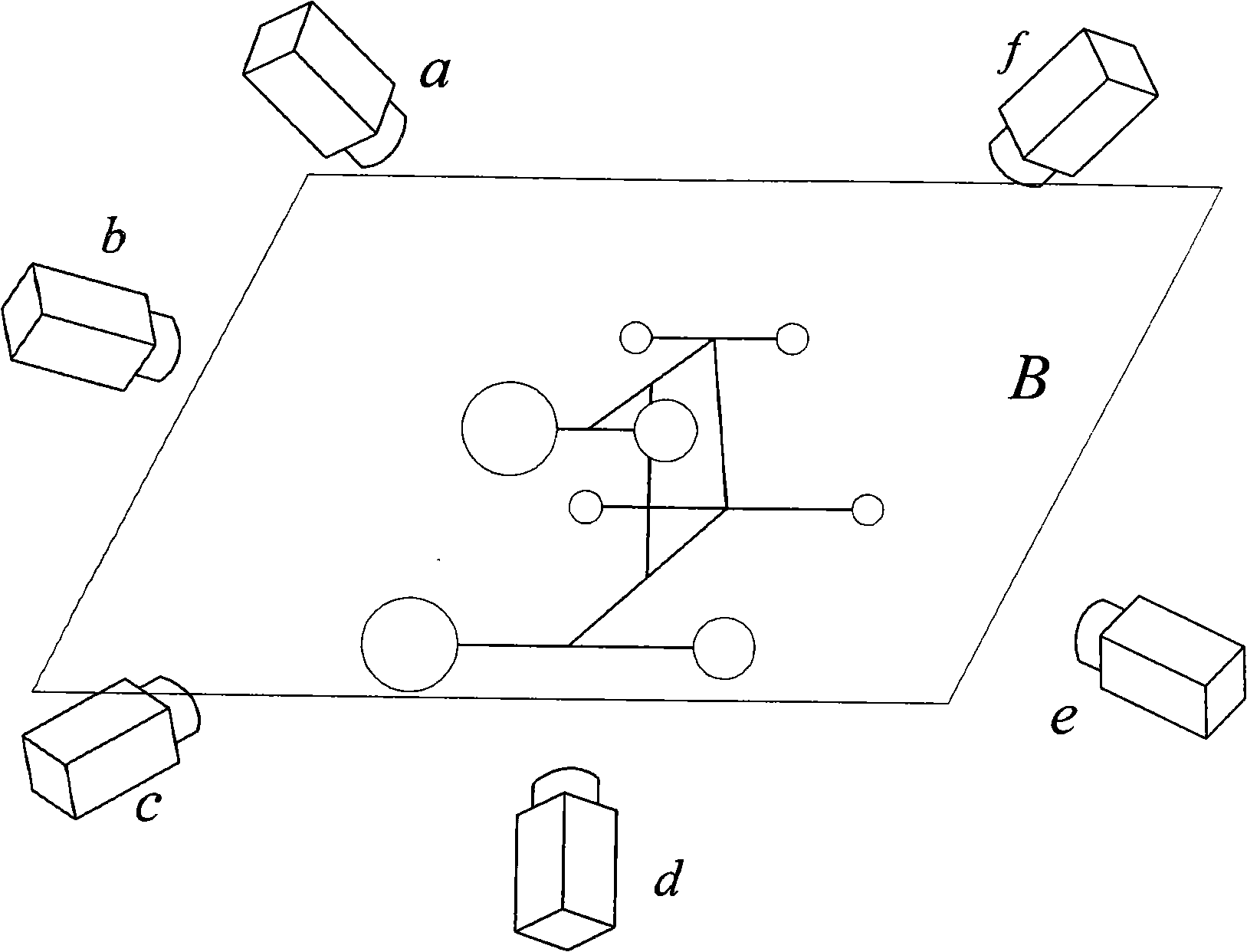
[0049] A synchronous and fast calibration method for obtaining parameters of multiple cameras in a three-dimensional scanning system, including: setting a three-dimensional calibration object, shooting the three-dimensional calibration object, combining with a pinhole perspective model, solving a homography matrix, and obtaining a single camera The internal parameter matrix, external parameter matrix and the initial value of the distortion coefficient, and use the nonlinear optimization method to solve the optimal solution of the parameters of a single camera, put the coordinate systems of multiple cameras in the space into the same camera coordinate system, And the optimal solution of rotation parameter matrix and translation parameter matrix between two cameras is obtained by using epipolar geometric constraint relation.
[0050] Below with reference to accompanying drawing, specific embodiment of the present invention is described in more detail:
[0051] (1) Setting of spa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com