Pneumatic flexible wall climbing robot
A technology of a wall-climbing robot and a flexible driver, applied in the field of wall-climbing robots, can solve the problems of large volume, poor flexibility, complex structure, etc., and achieve the effects of good flexibility and adaptability, small size and flexible movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
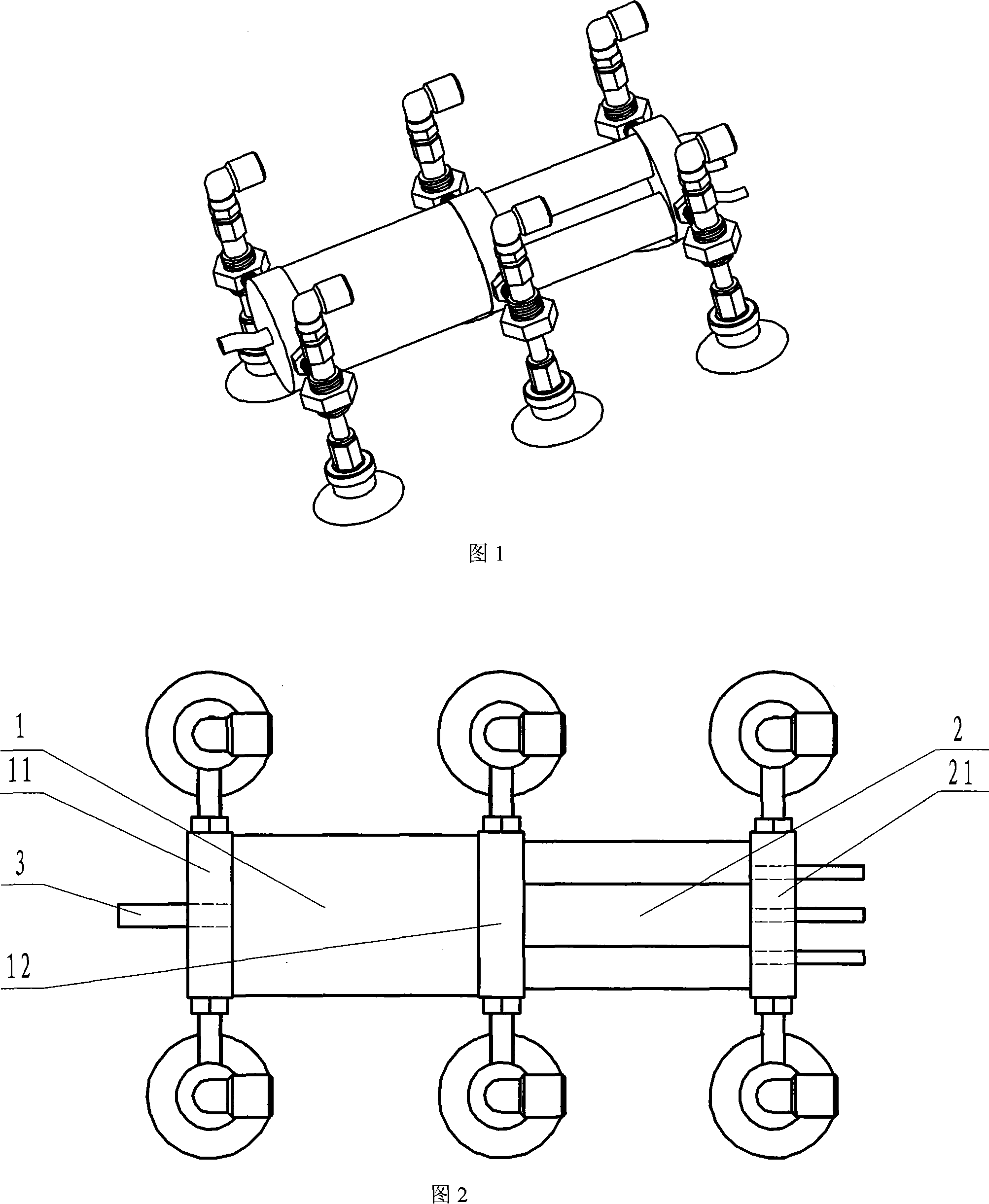
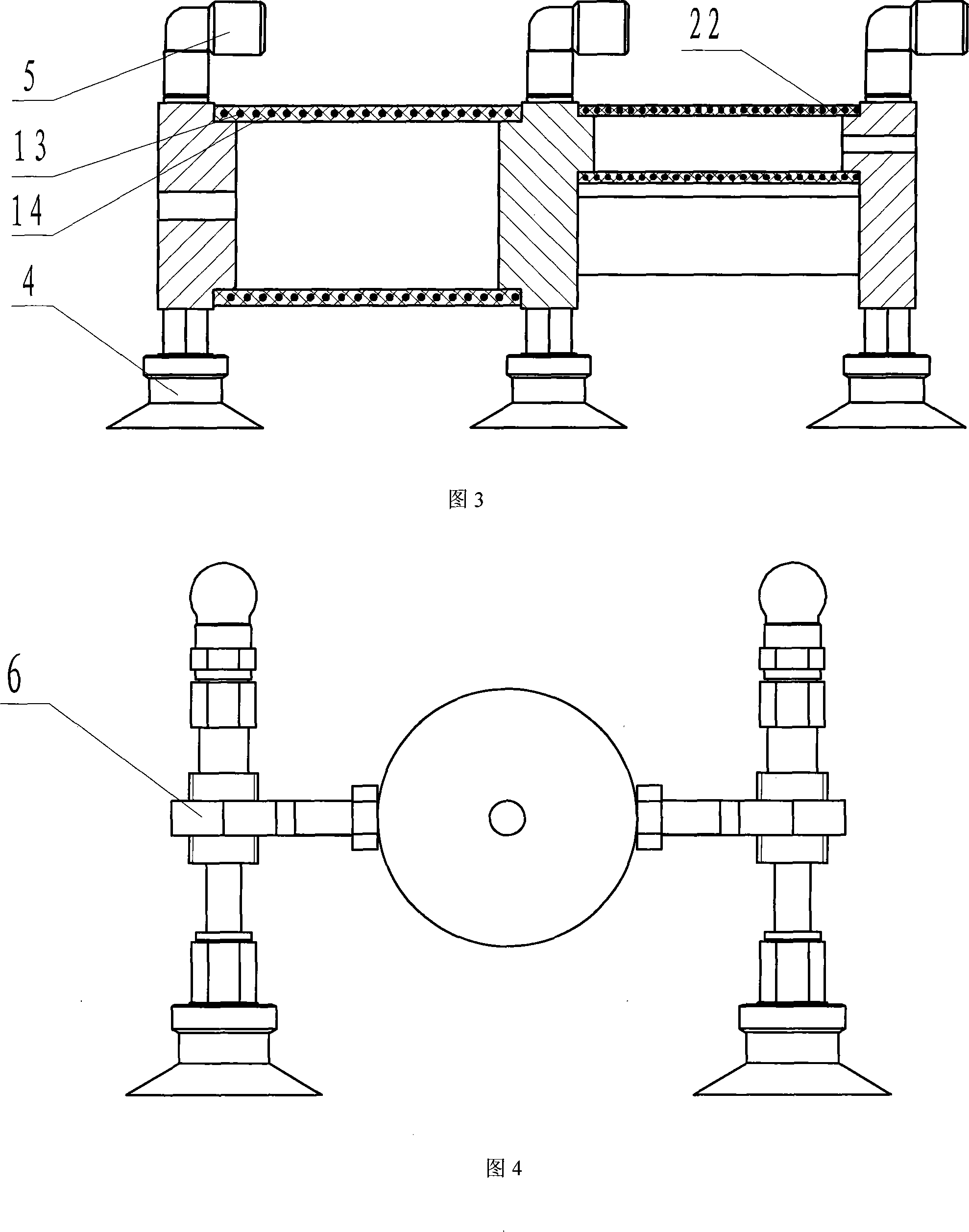
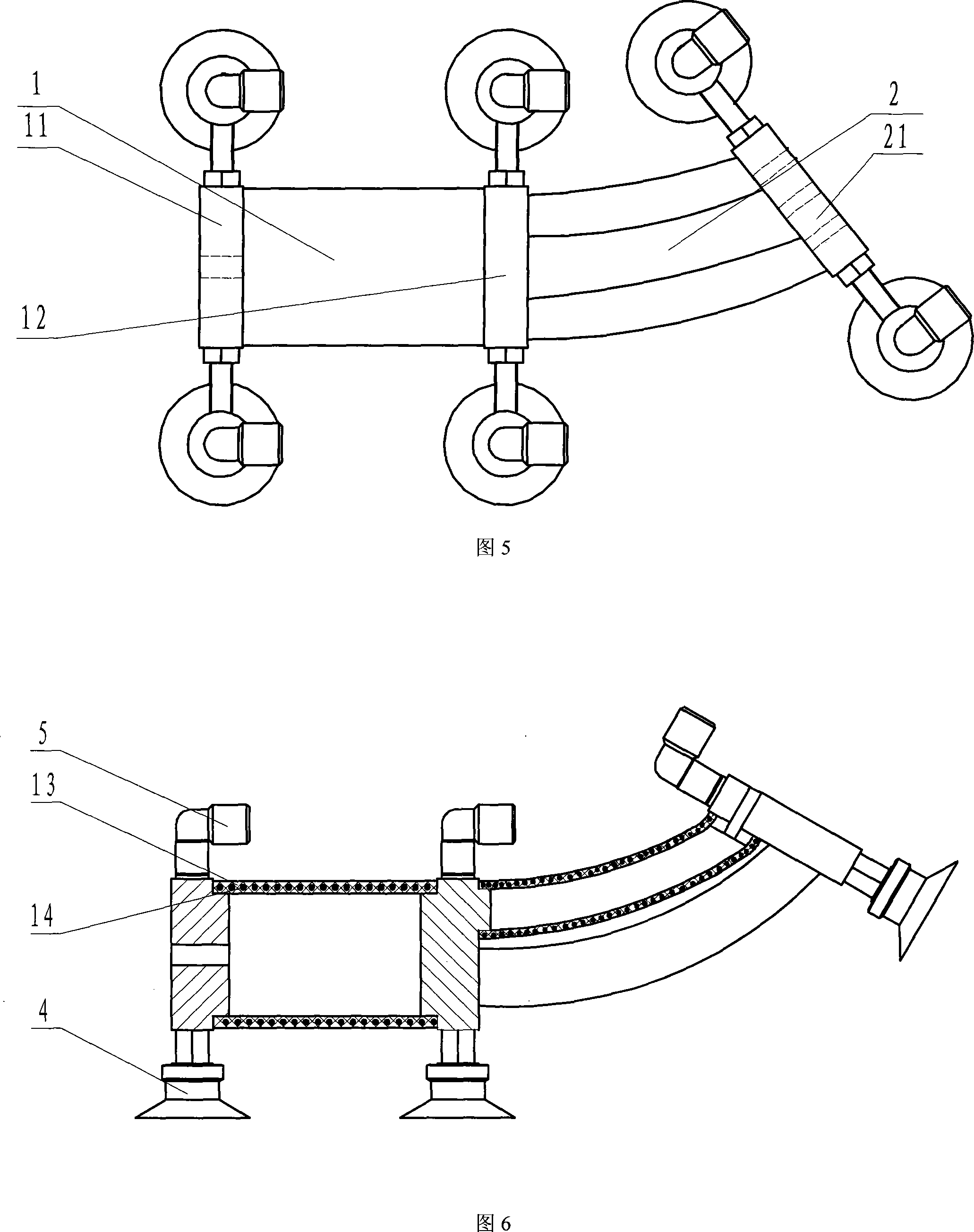
[0018] Referring to FIGS. 1 to 6 , a pneumatic flexible wall-climbing robot includes a pneumatic flexible driver 1 , a pneumatic flexible ball joint 2 , a vacuum suction cup 4 , a pipe interface 5 connected to the suction cup, and a suction cup connection frame 6 . The pneumatic flexible driver 1 includes a front end cover 11, a middle end cover 12, and a thick rubber tube 13. A through hole connected to the atmosphere, the wall of the thick rubber tube is nested with a spiral steel wire 14 and the spiral steel wire is tightly wound in the inner wall of the thick rubber tube along the radial direction of the thick rubber tube 13, when the high pressure The air pipe 3 passes the compressed gas into the inner cavity of the thick rubber tube 13 through the through hole of the front end cover 11. Due to the radial restriction of the spiral steel wire 14, under the pressure...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com