Open type movement-control system based on USB bus
A technology of motion control system and control system, applied in general control system, control/adjustment system, electric controller, etc., can solve the problems of inconvenient expansion, inappropriate educational robot, and failure to solve real-time control algorithm of non-real-time operating system, etc. , to achieve the effect of convenient expansion and large communication bandwidth
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
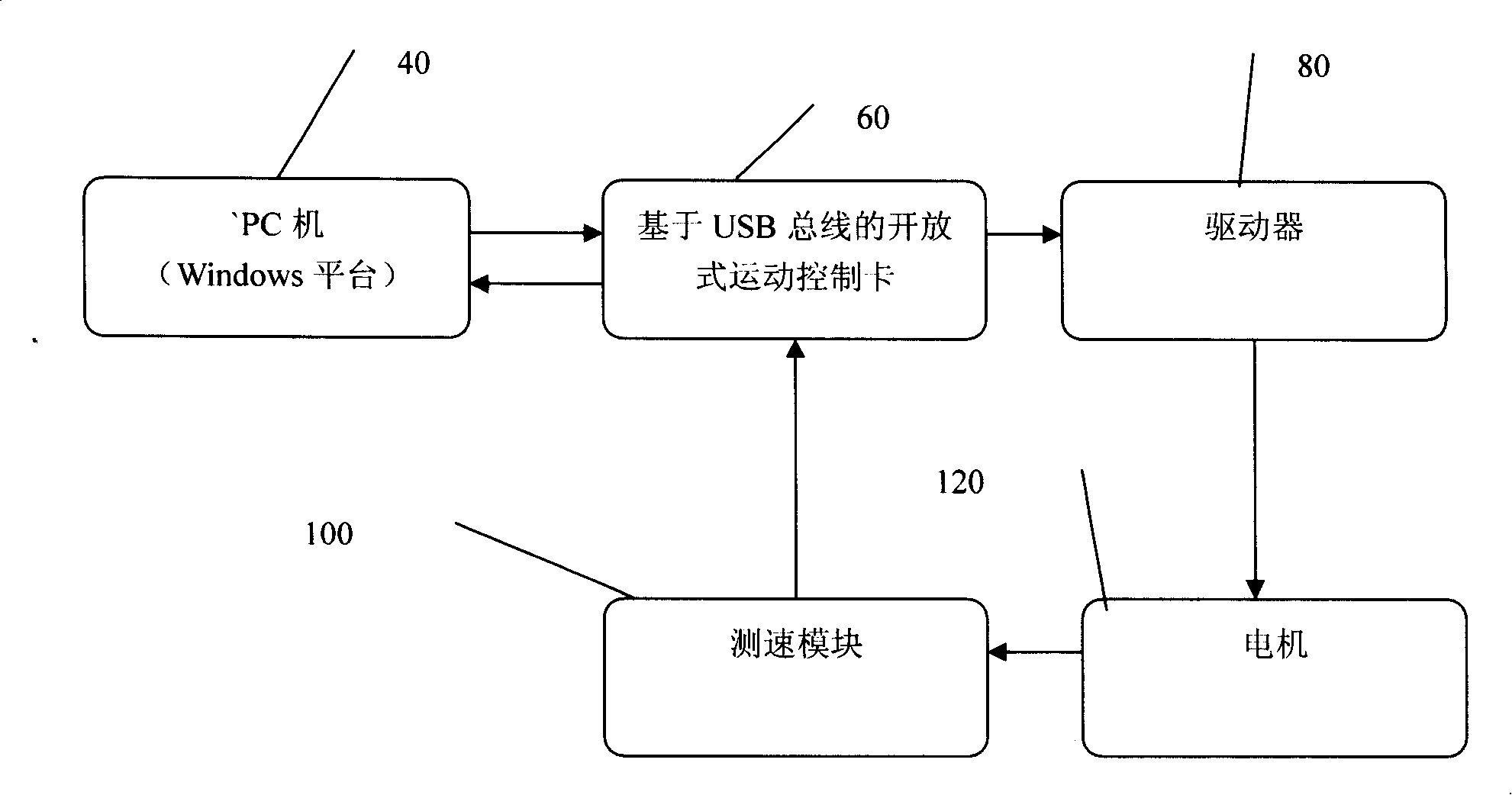
[0022] See figure 2 ;
[0023] One layer architecture:
[0024] PC 40--open motion control card based on USB bus 60--driver 80--motor 100----speed measurement module 120---open motion control card based on USB bus 60 ----- PC 40;
[0025] The PC collects the speed data (with time stamp) from the open motion control card 60 of the USB bus, compares it with the set parameters, calculates the difference, and then calculates a new control variable based on the difference to the open motion control card based on the USB bus. Type motion control card 60, the open type motion control card 60 based on USB bus produces new PWM duty cycle, different PWM duty cycle is given to driver 80, then drives motor 100, and the motion parameter of speed measurement module 120 collection motor is transmitted to based on The open motion control card 60 of the USB bus, and then the open motion control card 60 based on the USB bus sends the encoder data with a time stamp to the PC. The main body ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com