Mechanical vision locating method
A positioning method and machine vision technology, applied in the fields of instrumentation, photogrammetry/video surveying, surveying and navigation, etc., can solve the problems of accurate analysis of local parts of interest, insufficient detection accuracy, increased equipment cost, etc. Similarity, low cost, and improved detection accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
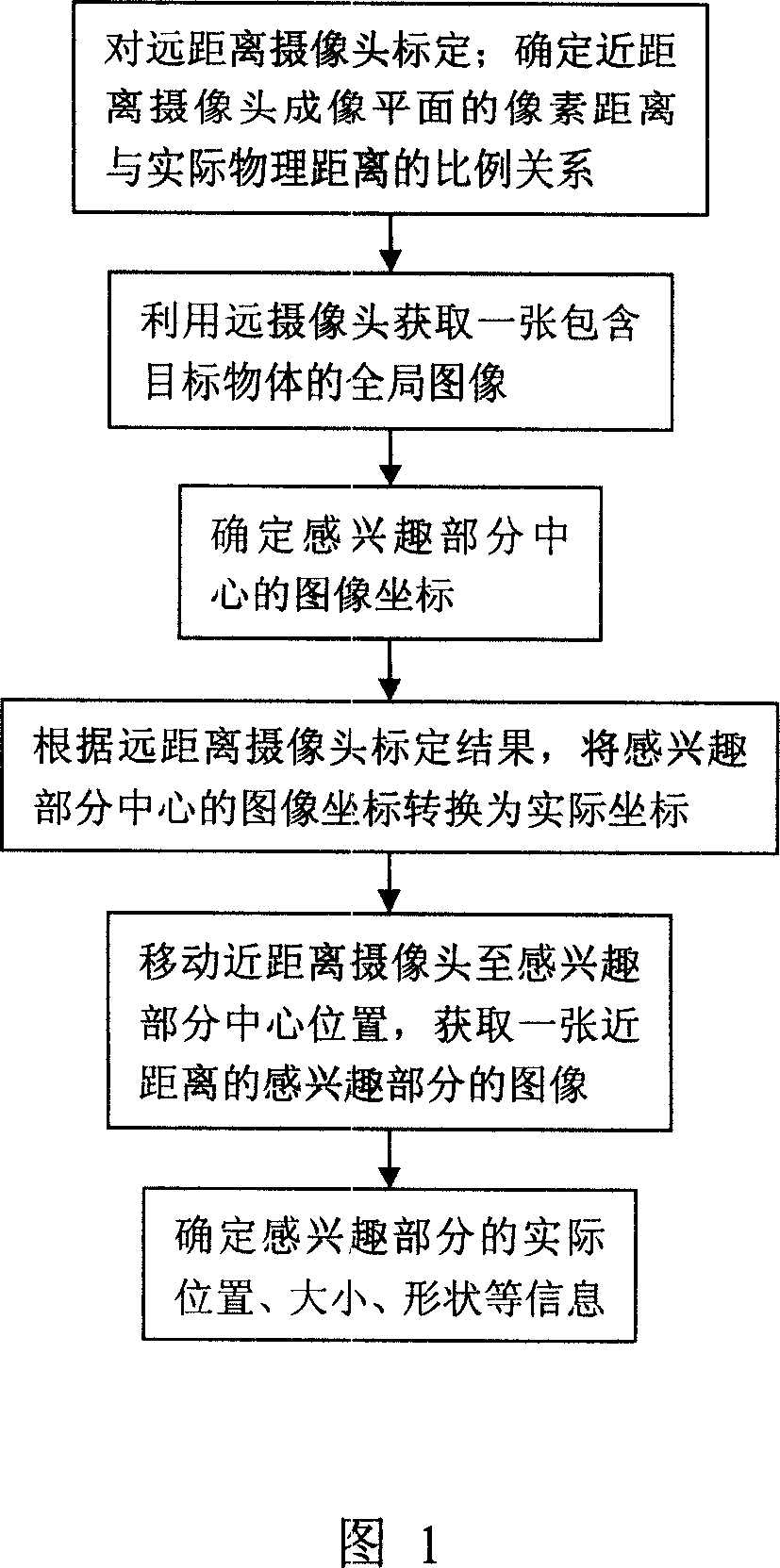
[0019] The basic principle of the present invention is: use two cameras, wherein, the long-distance camera processes the target object as a whole, shoots the global image of the target object, and detects the interesting part on the captured global image (depending on the needs of the application) ); and then control the manipulator to move the close-range camera to these parts of interest, and take high-precision images for further detailed detection and analysis.
[0020] The technical solutions of the present invention will be further described in detail below in conjunction with the accompanying drawings and examples.
[0021] As shown in Figure 1, the machine vision positioning method of the present invention comprises the following steps:
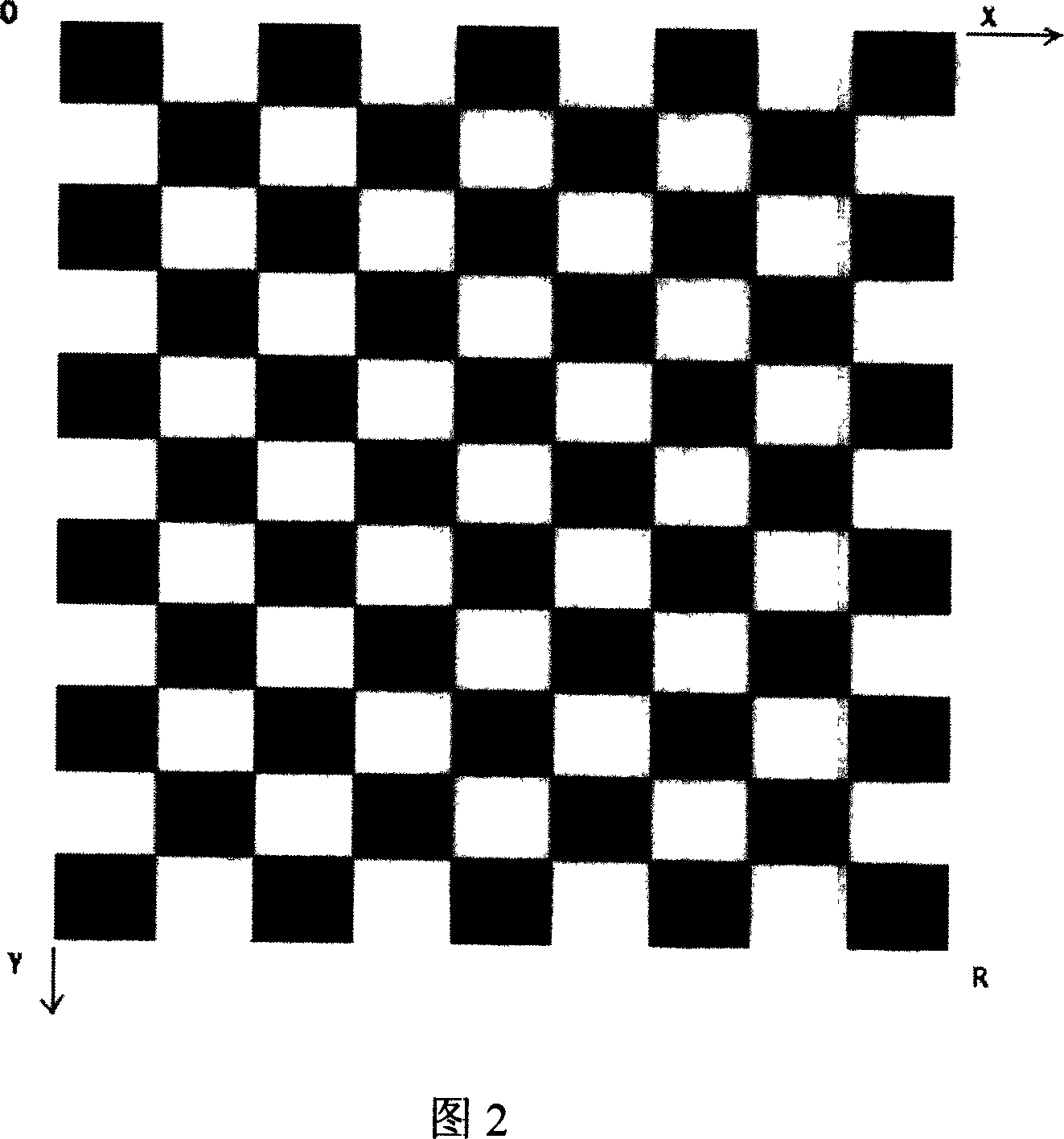
[0022] (1) Calibrate the long-distance camera, determine the corresponding coordinate transformation relationship between its imaging plane and the measured target plane; and determine the proportional relationship between the pixel d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com