Data blending method of navigation system combined by SINS/GPS micromagnetic compass
An integrated navigation system and data fusion technology, applied in the field of data fusion of SINS/GPS/magnetic compass integrated navigation system, can solve problems such as complex calculation, difficult to meet spacecraft navigation requirements, and influence on magnetic compass
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
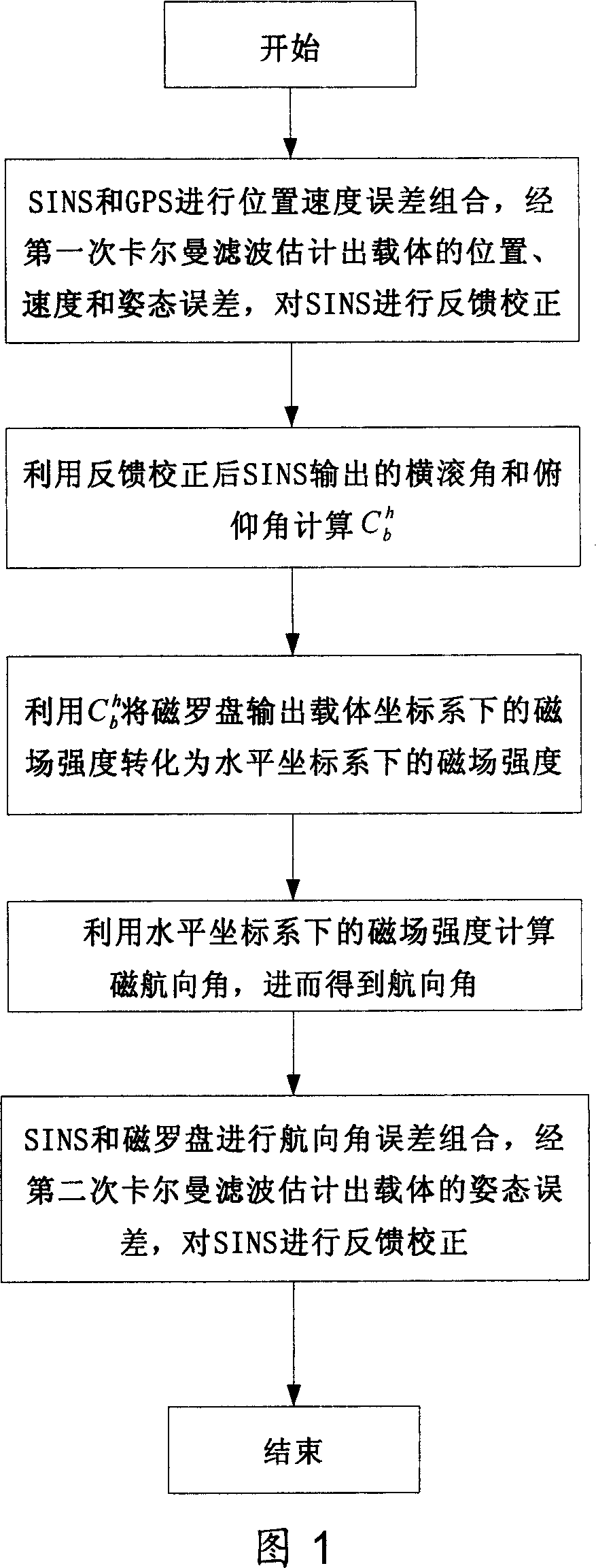
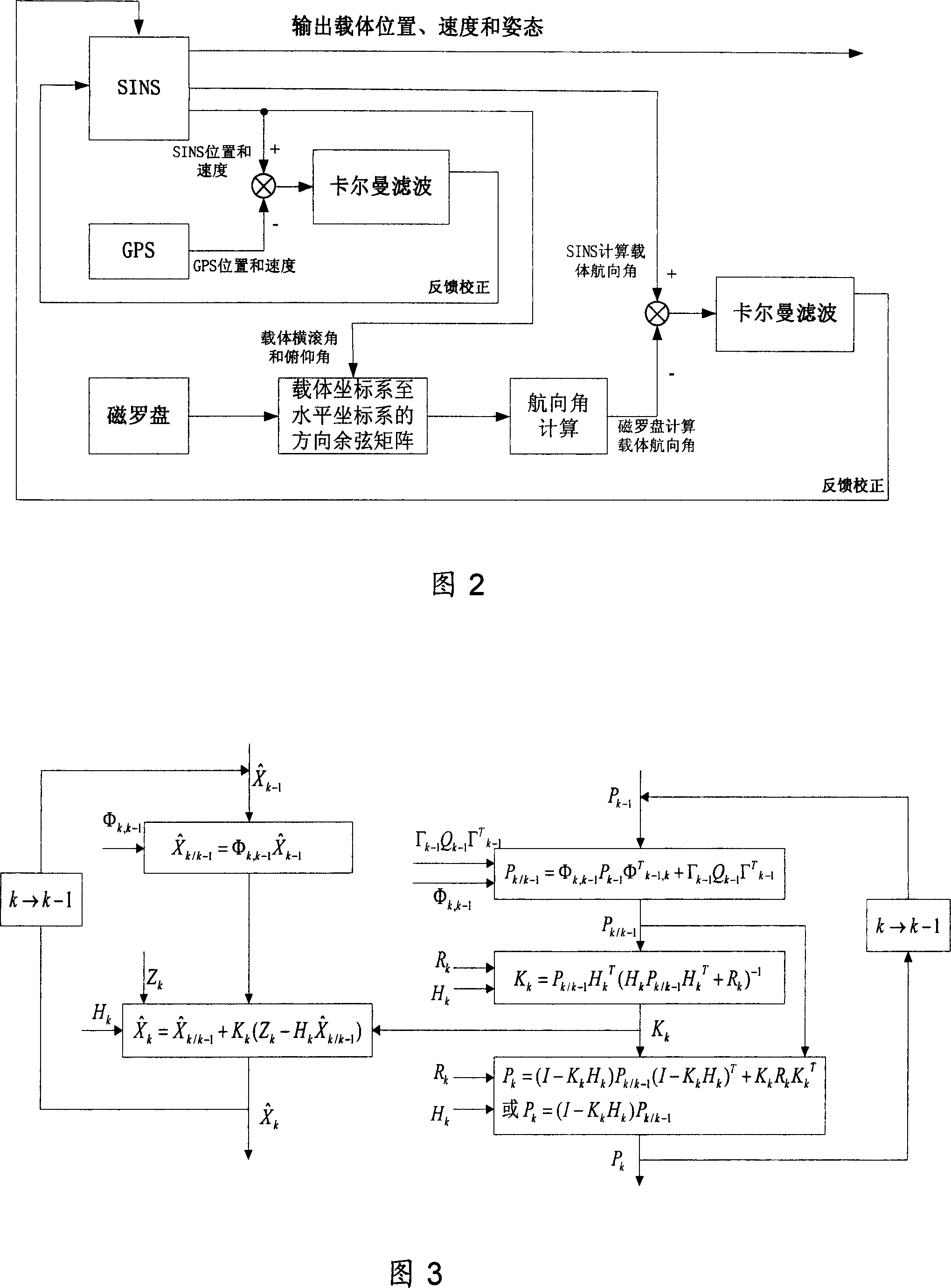
[0032] As shown in Fig. 1,2,3, concrete method of the present invention is as follows:
[0033] (1) Combine the position and velocity errors of SINS and GPS to obtain the error equation, estimate the position, velocity and attitude errors of the carrier through the first Kalman filter, and perform feedback correction on the position, velocity, roll angle and pitch angle of SINS ;
[0034] ① The error equations for combining position and velocity errors between SINS and GPS include system state equations and measurement equations, as shown in formula (1) and formula (2) respectively.
[0035] System state equation:
[0036]
[0037] Among them, X 1 =[φ E φ N δV E δV N δV U δL δλ δh ε E ε N _ U ] is the system state vector, W 1 =[w εE w εN w εU w _E w _N w _U ] T is the system noise vector, F 1 is the system transition matrix, G 1 is the noise transformation matrix. φ E and φ N is the east and north platform misalignment angle; δV E , δV N...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com