Lens holding robot system for microinjury surgery
A robotic system and minimally invasive surgery technology, applied in surgical instruments, surgical saws, external fixators, etc., can solve problems such as inability to apply clinical operations, and achieve the effects of disassembly and rapid installation, small size and high efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0019] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
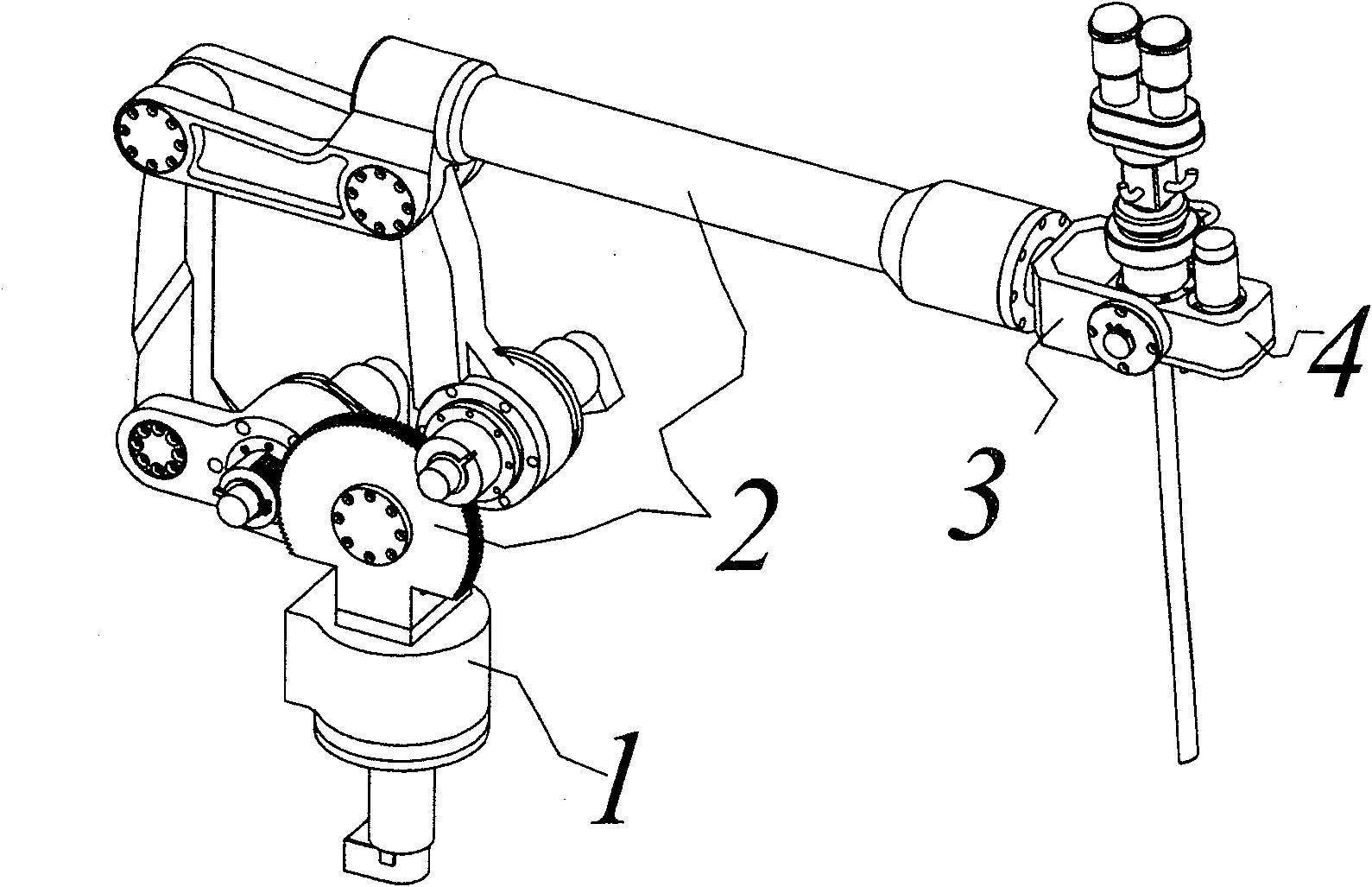
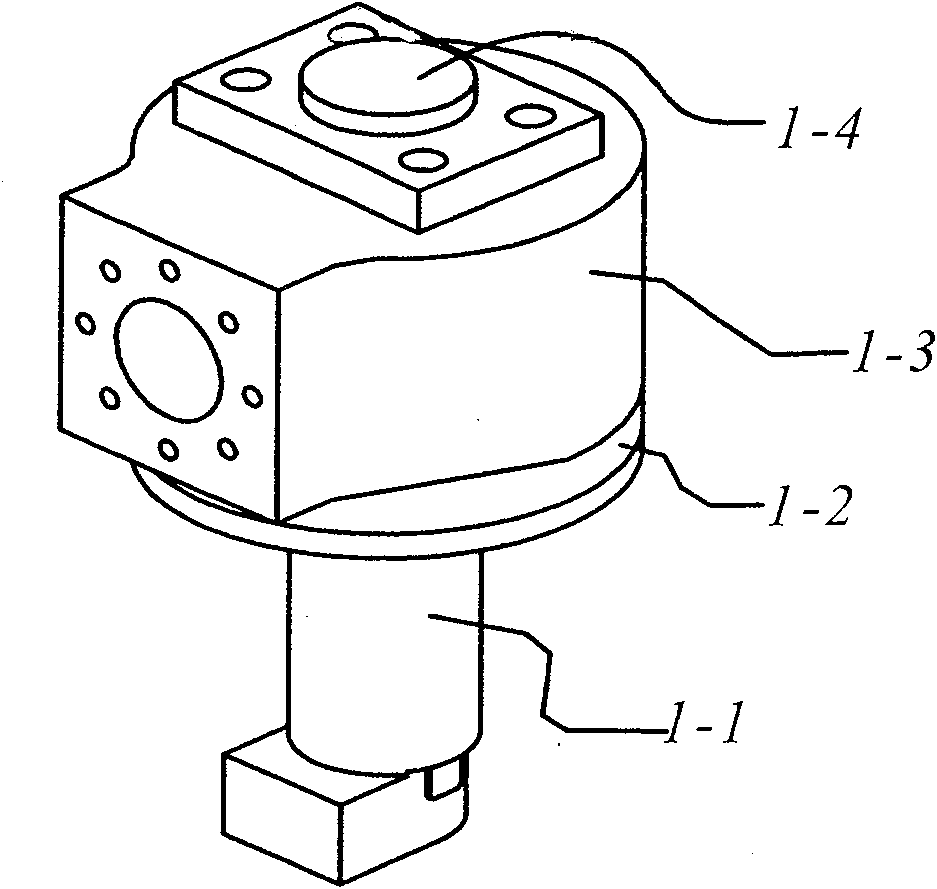
[0020] A mirror-holding robot system for assisting minimally invasive surgery of the present invention in conjunction with the accompanying drawings, it includes a base part 1, a body part 2, a passive link part 3, and an endoscope seat part 4, and the base part includes The speed reducer 1-2 and the driving motor 1-1 connected to each other installed on the support 1-3, the output shaft of the reducer 1-2 and the drive shaft 1 installed on the support -4 connected; the body part 2 includes a first support frame 2-1 connected with the drive shaft 1-4 and provided with a gear or a grooved sheave on the first support frame 2-1. A parallelogram mechanism is installed on the support frame 2-1, and the parallelogram mechanism includes first and second driven rods 2-4, 2-5, on which first and second driving gears 2-31, 2-32 or the first and second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com