Real time control device and control method by two-degrees-of freedom myoelectricity artificial hand
A technology of real-time control and degree of freedom, applied in the field of information and control, can solve the problems of poor bionic performance, inconvenient operation, lack of real-time performance, etc., and achieve the effect of improving bionic ability and reliable motion control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0015] Embodiments of the present invention will be described with reference to the drawings.
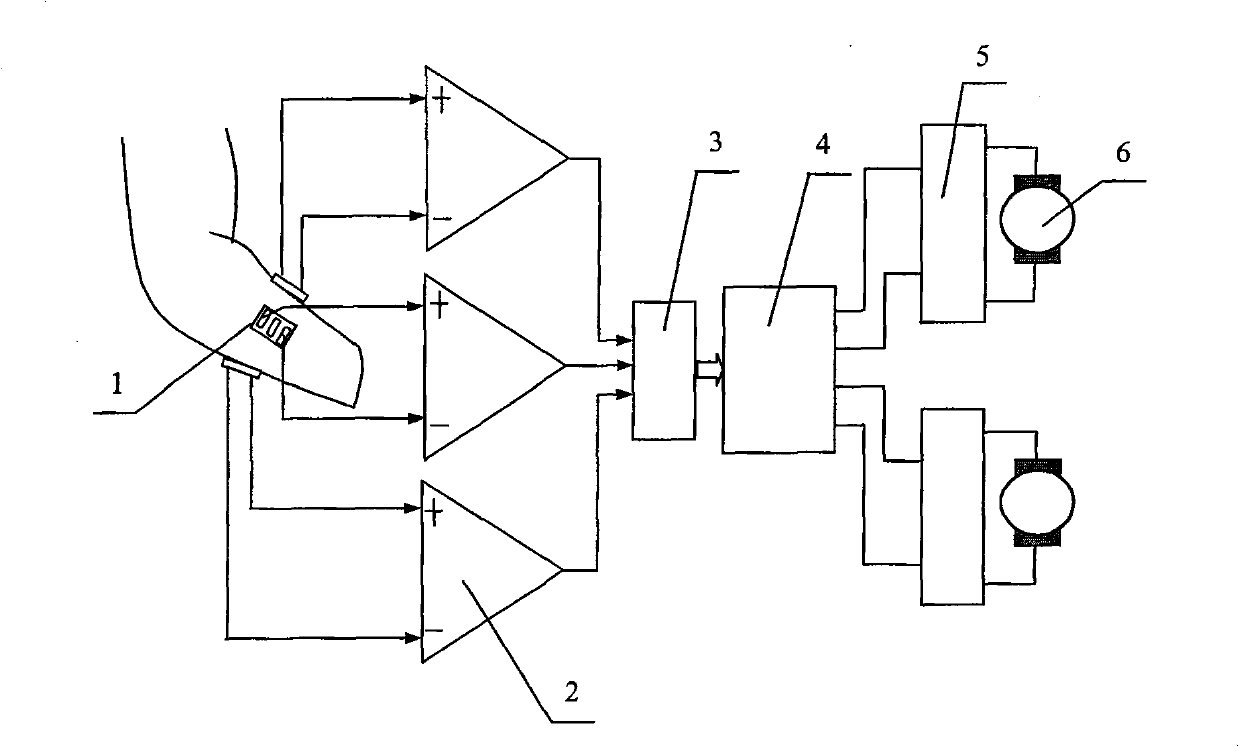
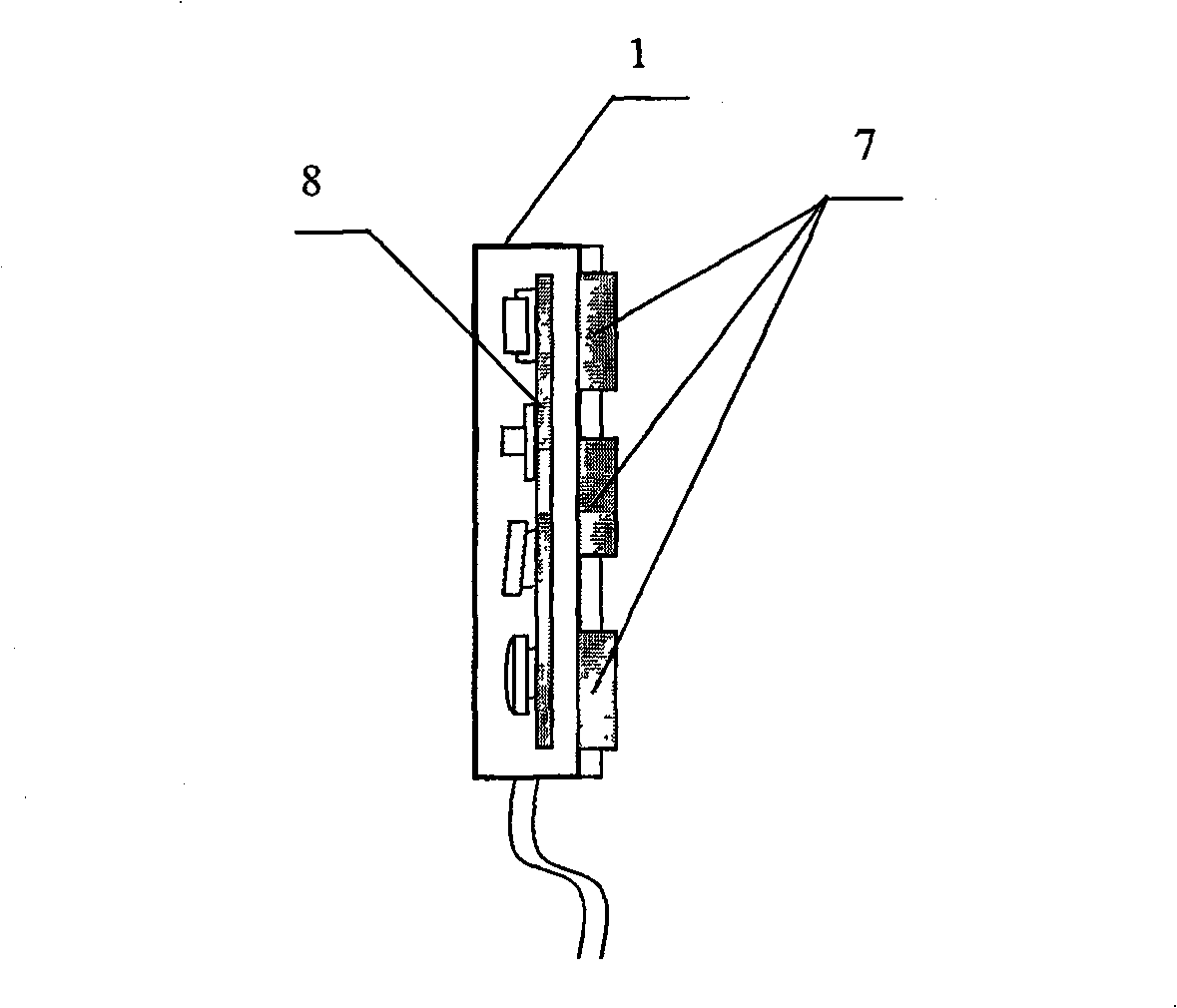
[0016] The present invention as figure 1 and figure 2 As shown, the two-degree-of-freedom myoelectric prosthetic hand real-time control device includes three myoelectric pickup sensors placed on the skin surface corresponding to the extensor carpi ulnaris, flexor carpi ulnaris, and finger extensors of the disabled arm 1. Each electromyographic pickup sensor 1 includes three pick-up electrodes 7 and a localized primary amplifier circuit 8 signal-connected to the pick-up electrodes 7, and the three pick-up electrodes 7 are positive electrodes, negative electrodes and ground electrodes respectively. The pick-up electrode 7 and the primary amplifier circuit 8 of the electromyographic pick-up sensor 1 are structurally integrated, and the pick-up electrode 7 is a rectangular gold-plated copper electrode whose size and shape are the same as those conventionally used in SEMG pick-up. Th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com