Mechanical claw with rigidity controllable flexible surface
A soft and mechanical technology, applied in the application field of electrorheological fluid, can solve the problems of arbitrary adjustment of contact stiffness, clamping of clamped objects, and inability to function, so as to achieve the effect of maintaining position and stability and ensuring stability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
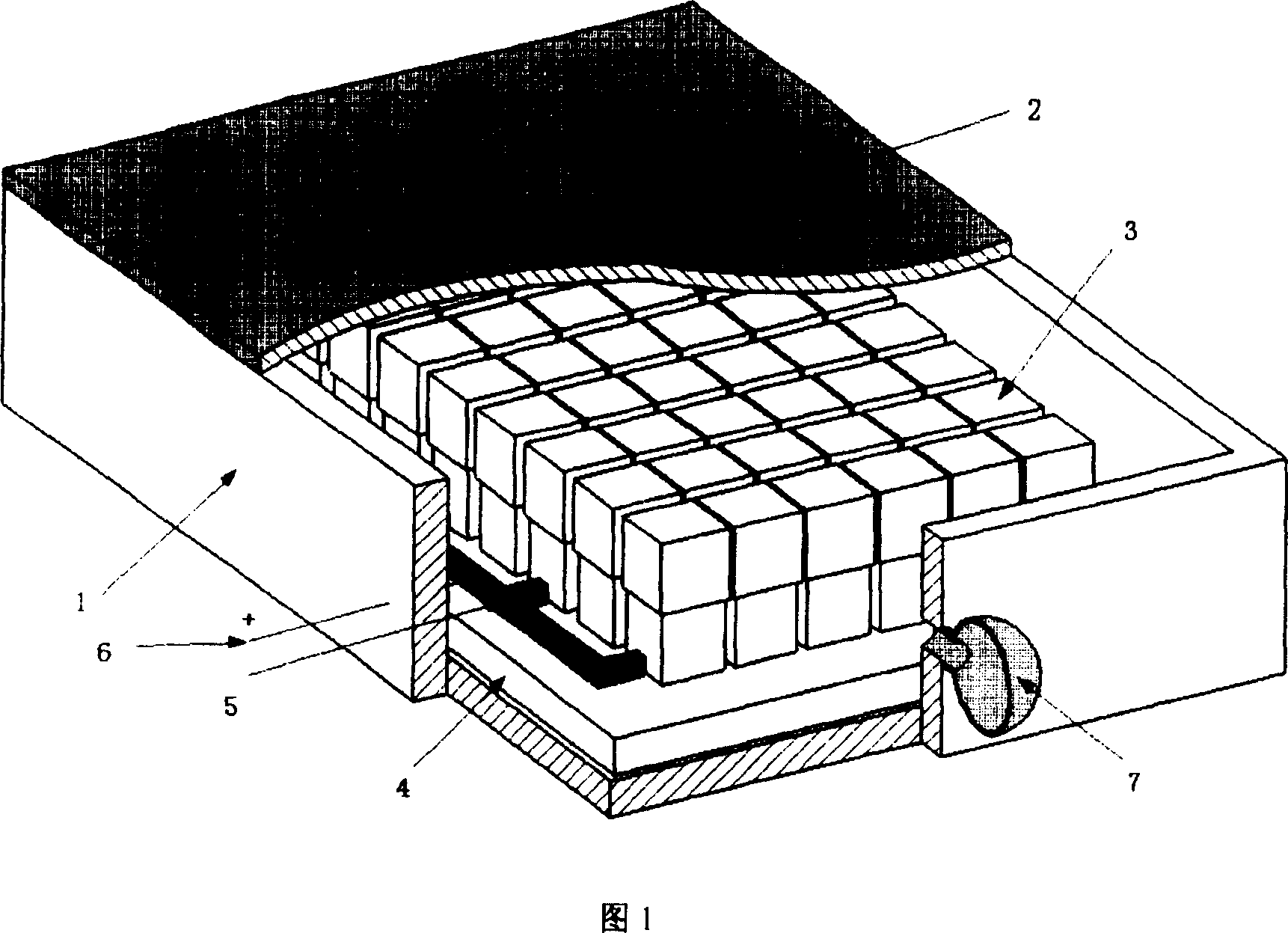
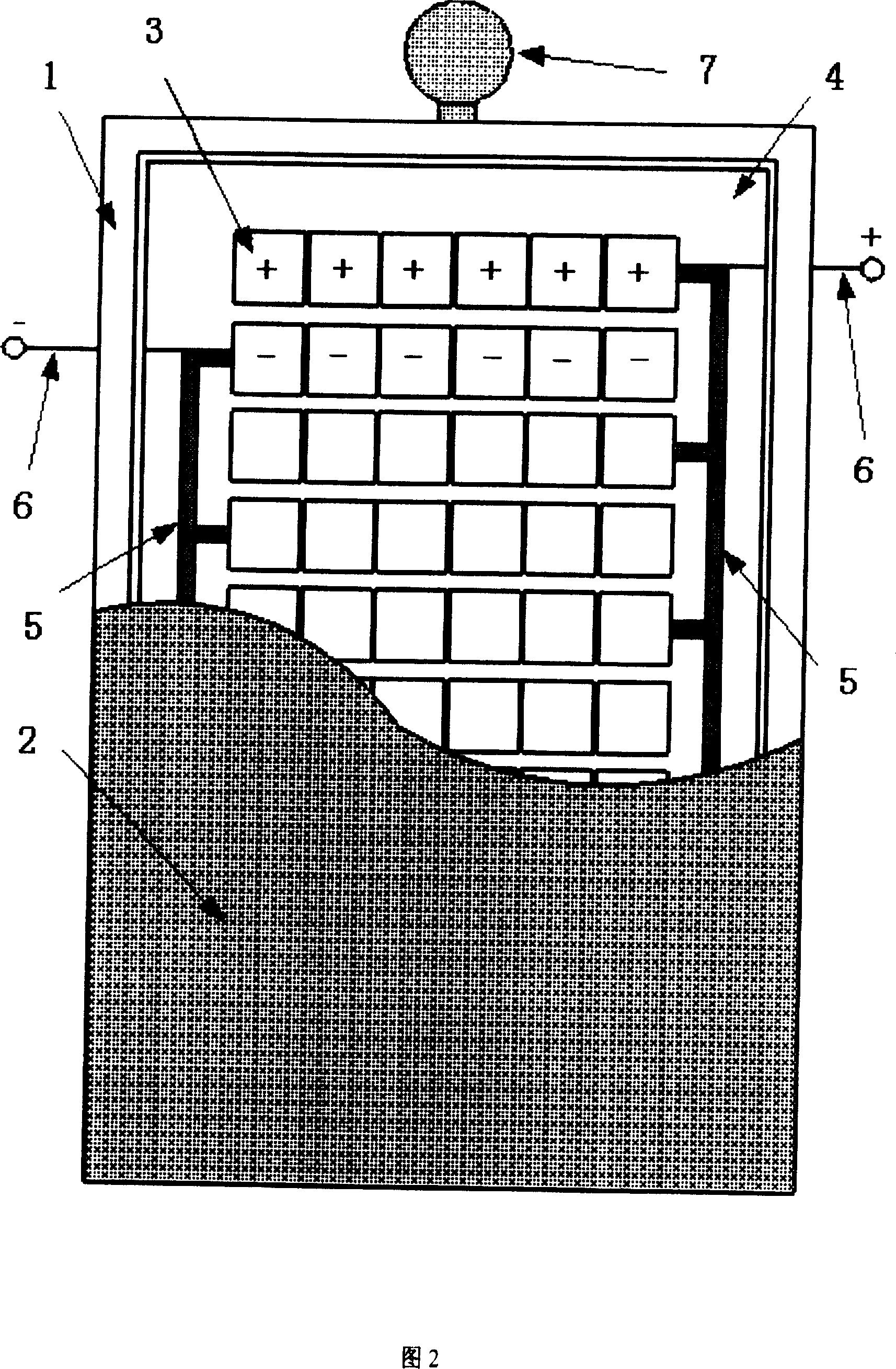
[0013] Referring to Fig. 1 and Fig. 2, 1 is the rectangular container (as 50mm * 30mm * 5mm) of upper end opening, and 2 is the highly elastic film (as rubber film) that is covered in upper opening end. 3 is ten rows of elastic electrodes arranged in the container, with a spacing of 0.5mm; all elastic electrodes are fixed on an insulating plate 4, and the insulating plate (such as a plastic plate) is fixed on the container space by bonding. bottom of the cavity. The high elastic film 2 is bonded on the periphery of the container 1 and the upper end surface of the electrode by superglue. The elastic electrodes in the first row are positive electrodes, and the second row is negative electrodes (or vice versa, that is, the elastic electrodes in the first row are negative electrodes, and the second row is positive electrodes), and so on, the positive and negative electrodes alternate. After the individual electrodes in each row are connected in series, the first, third, fifth, se...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com