Robotic manipulators
a robot and manipulator technology, applied in the field of physical design of a controlled robotic system, can solve the problems of repeating complex performances with unerring precision, difficult to build automated machines for manipulating objects of various shapes, sizes, inertias and materials, and difficult to perform many tasks that involve contact with other objects,
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
.”
BRIEF DESCRIPTION OF THE DRAWINGS
[0013]Features, aspects, and embodiments are described in conjunction with the attached drawings, in which:
[0014]FIG. 1 is a diagram illustrating an example an environment in which a robot can be controlled in accordance with one embodiment;
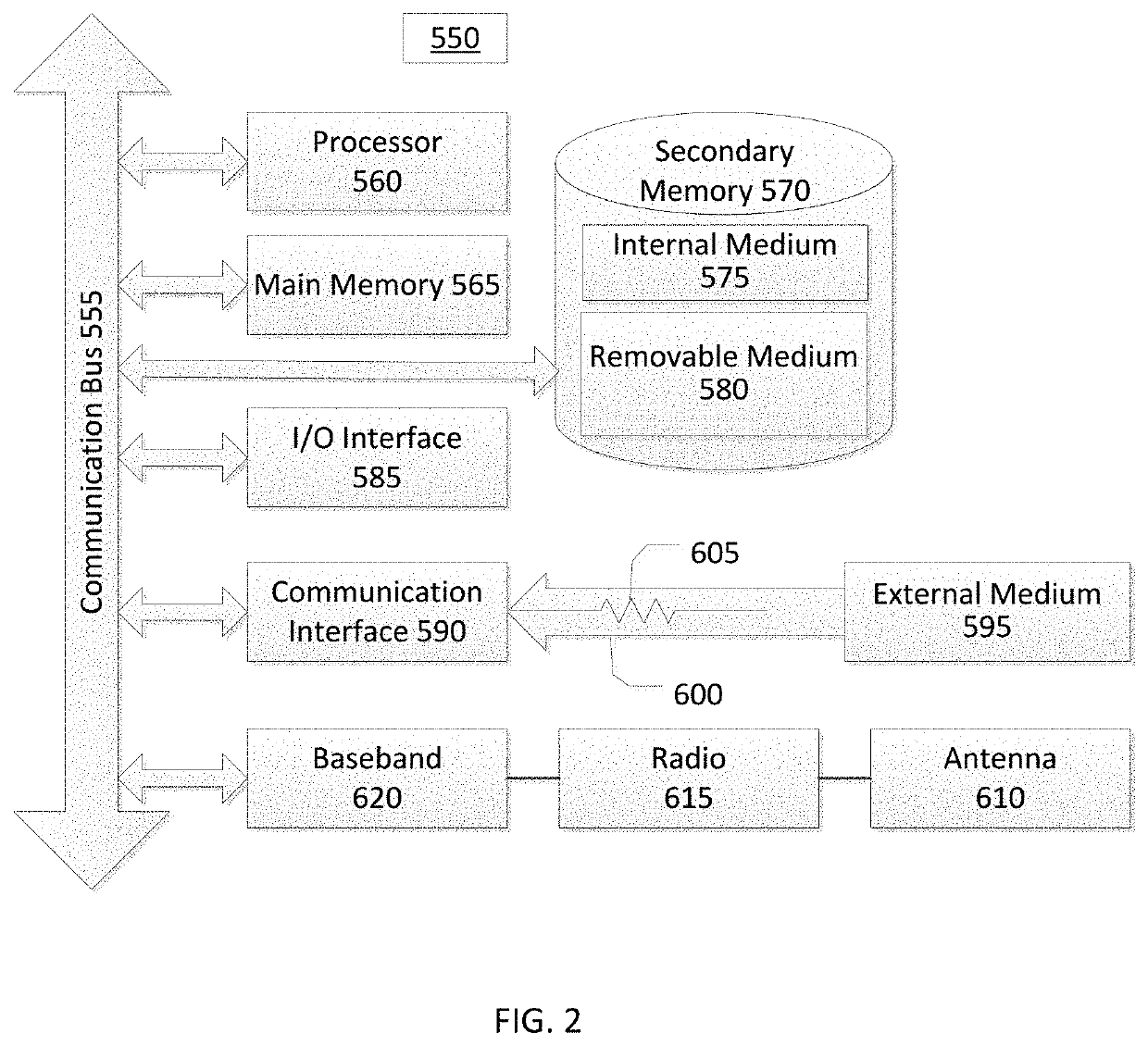
[0015]FIG. 2 is a block diagram illustrating an example wired or wireless system that can be used in connection with various embodiments described herein;
[0016]FIG. 3 is a diagram illustrating an example robot that can be used in the environment of FIG. 1 and controlled in accordance with one embodiment;
[0017]FIGS. 4A and 4B illustrate an example robot mounted on a gantry in accordance with one example embodiment;
[0018]FIGS. 5A and 5B are diagrams illustrating mechanisms that allow each arm of, e.g., the robot of FIGS. 4A and 4B to move up and down a corresponding leg; and
[0019]FIG. 6 is a diagram illustrating a differential chain drive that effects rotational motion at a pulley C, and linear motion of the carri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com