Method and Apparatus for Detecting Plane, and Robot Apparatus Having Apparatus for Detecting Plane
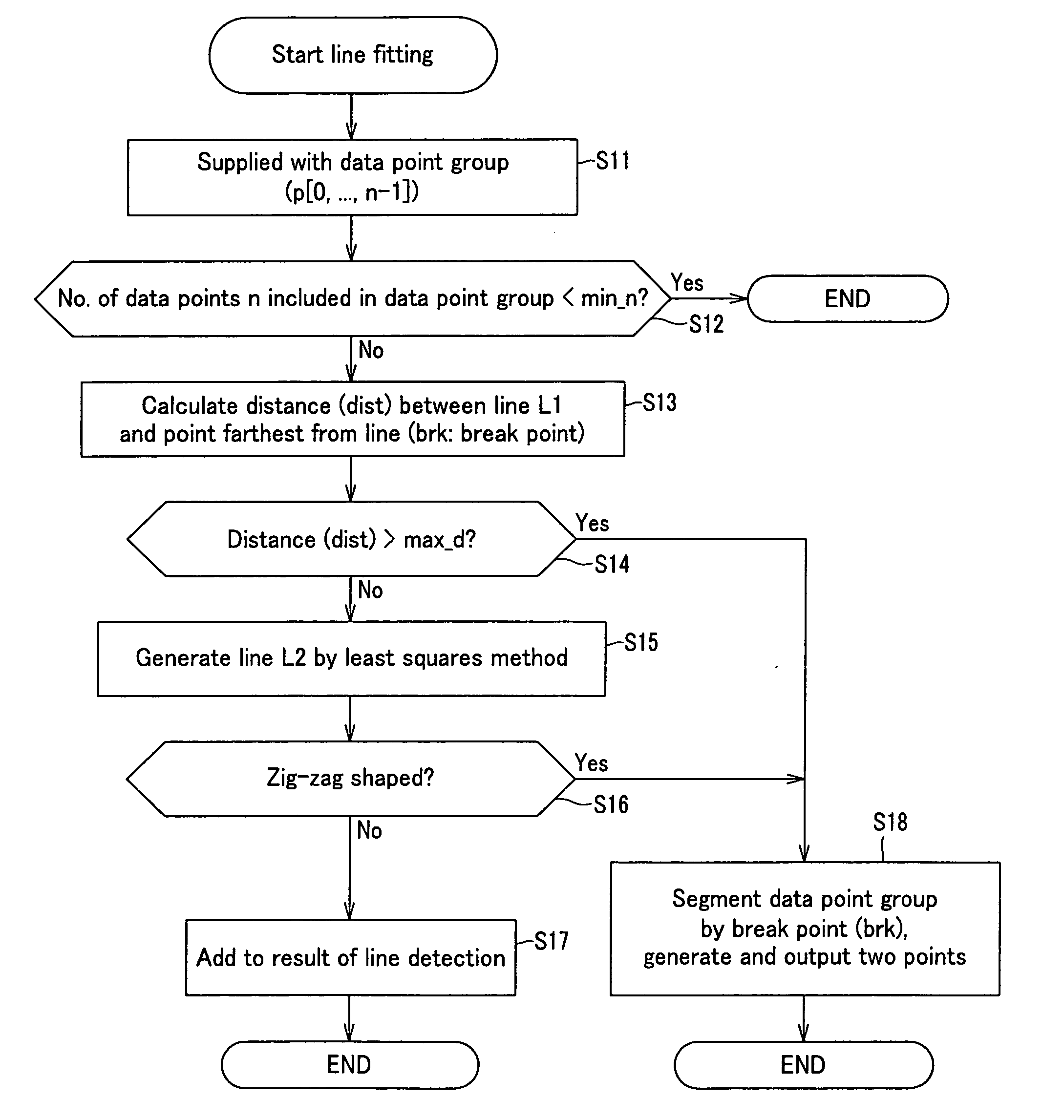
a robot and plane technology, applied in the field of methods and apparatus for detecting planes, can solve the problems of excessively small segmentation of lines, difficult to determine the threshold for line fitting, and inability to extract lines which could normally be extracted, etc., to achieve the effect of accurate extraction of lines, greater entertainment, and accurate detection of planes
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Benefits of technology
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0092] The embodiment which will be illustrated and explained hereunder is an application of the present invention to a robot apparatus having installed therein a plane detection apparatus capable of detecting a plurality of planes simultaneously and accurately.
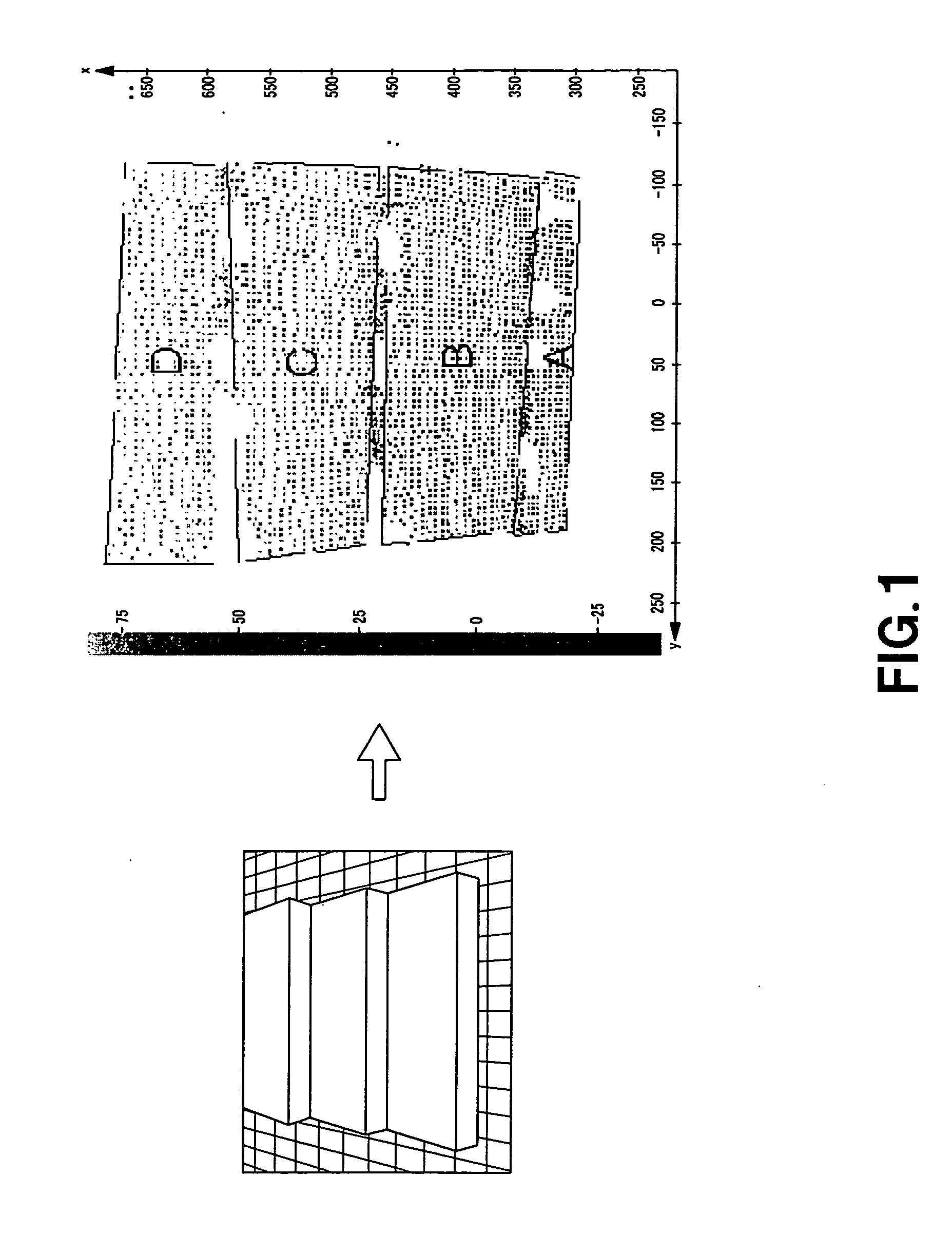
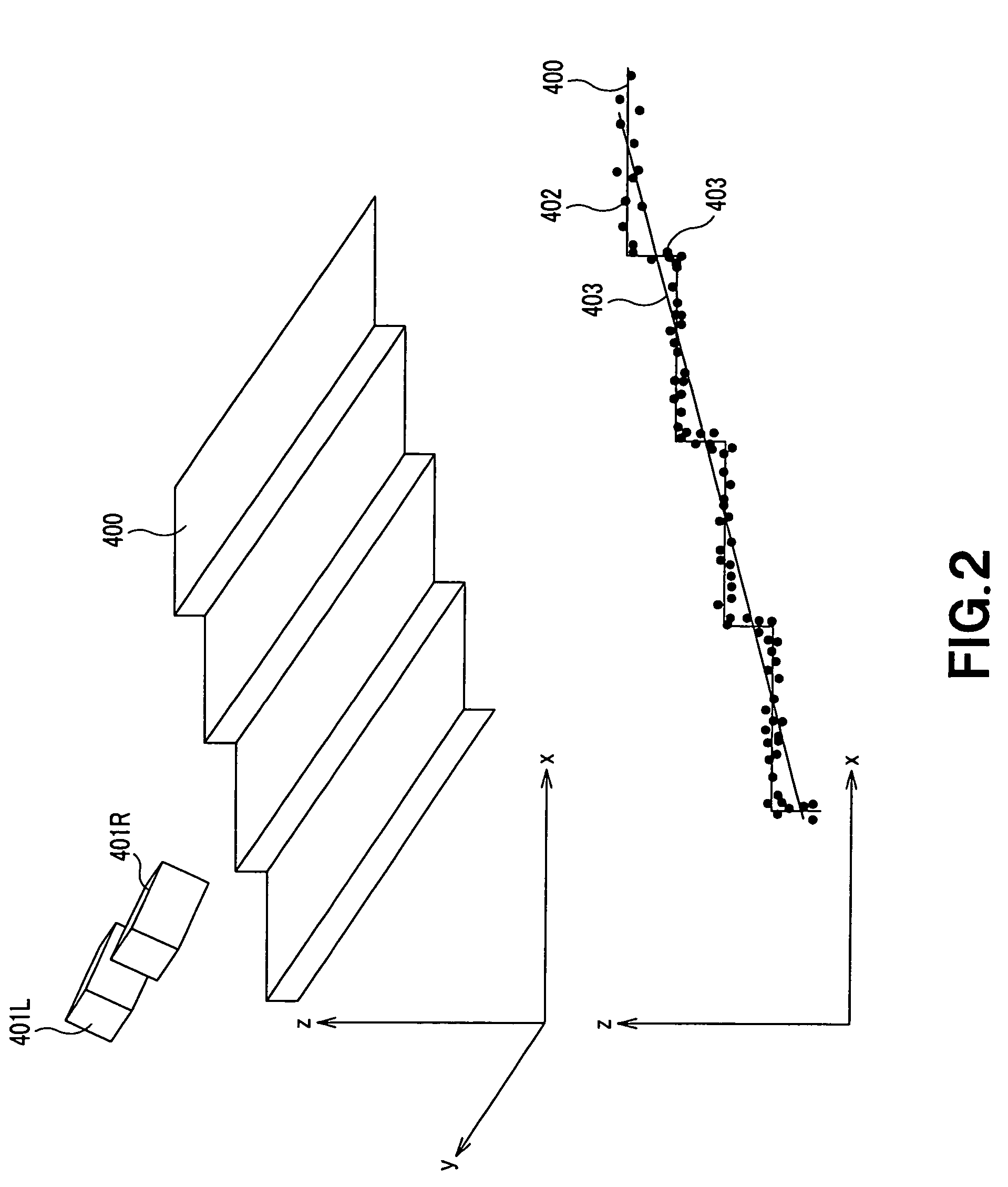
[0093] The plane detection apparatus according to the embodiment can extract a plurality of planes from range information acquired using a stereo vision system. Namely, it can make a detection robust against measuring noises. For example, the plane detection apparatus installed in a robot apparatus enables the robot apparatus to accurately recognize its environment such as an object including a plurality of planes such as stairs and surroundings and autonomously move and act according to the result of recognition.
[0094] The embodiment will be explained first concerning a robot apparatus of bipedal walking type as an example. The robot apparatus is a practical-use robot which supports human activities in various living envir...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com