Six-freedom remote control arm with gravity compensation and length regulation
A gravity compensation and teleoperation technology, applied in the field of robotics, can solve the problem of gravity affecting different operators.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
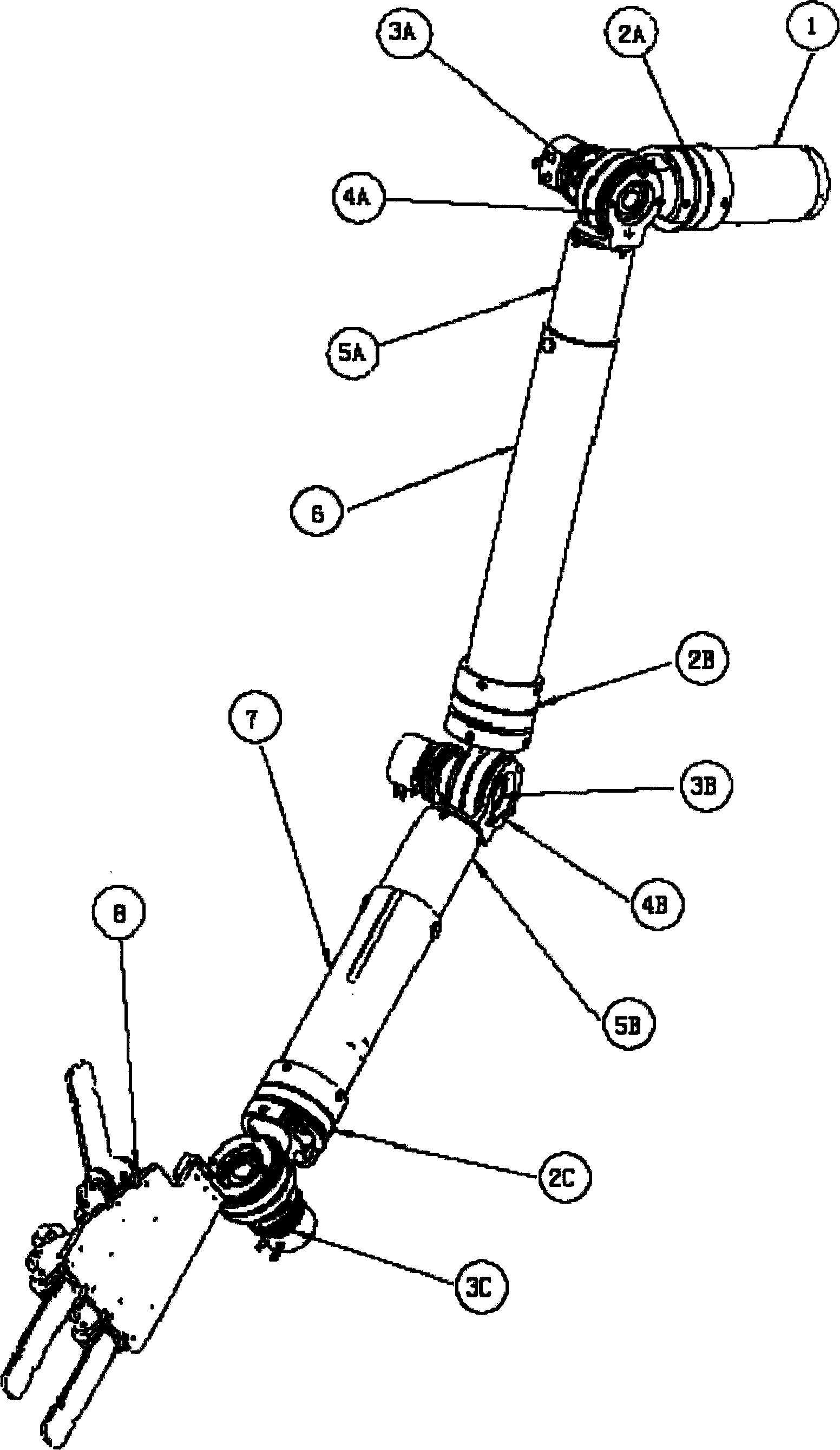
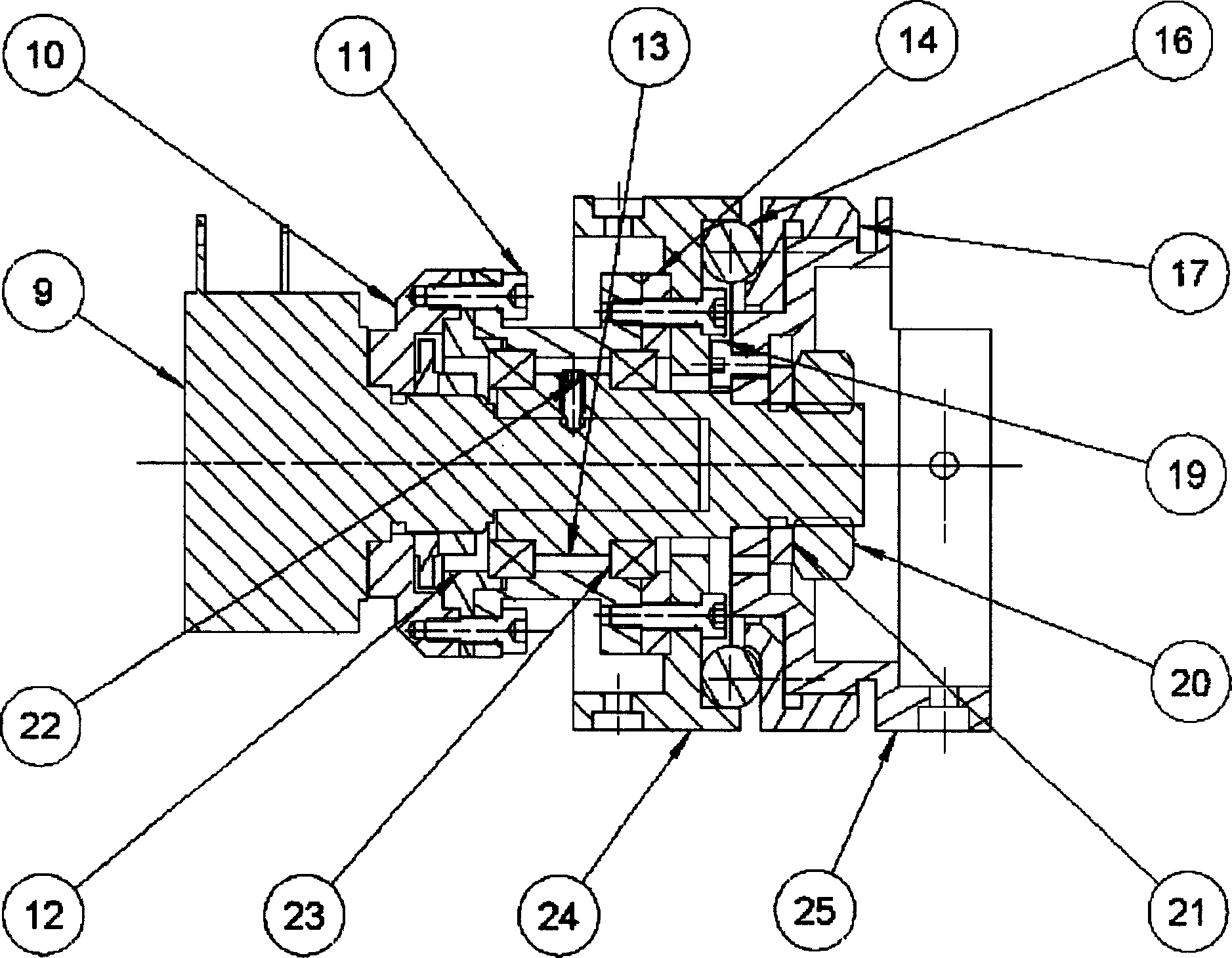
[0030] First: before the operation starts, the shoulder 1 of the data arm mechanism will be fixed on the operation platform, and the friction discs 17 of each rotary joint will be rotated to adjust the friction to an appropriate level.
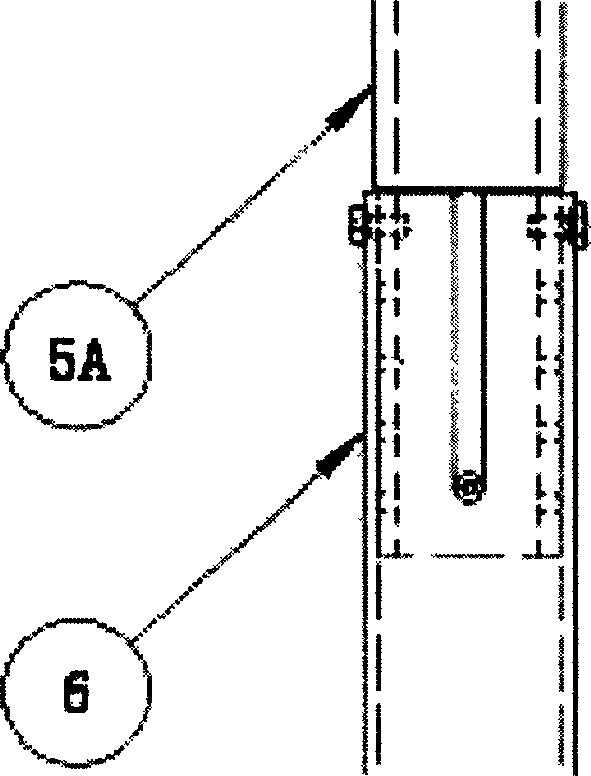
[0031] Second: adjust the length of the big arm 6 and the small arm 7 of the data arm mechanism according to the operator's arm length.
[0032] Third: Keep the big arm 6 of the operator's right arm straight, the small arm 7 stretched flat, and the palm of the hand is stretched flat to the left. The angle between the big arm 6 and the small arm 7 is 90 degrees. Place the operator's shoulders under shoulder 1 of the data arm mechanism. The big arm 6 of the data arm mechanism is on the right side of the operator's big arm; and the operator's wrist joint is above the data arm mechanism wrist joint.
[0033] The 4th, the operator's shoulder, arm, hand, and fingers are respectively fixed with the corresponding parts of the data arm mechanism with...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com