Massage robot for traumatological department of traditional chinese medicine
A robot, a new type of technology, applied in the field of medical machinery, can solve the problems of high labor intensity and strong physical labor for doctors, and achieve significant economic and social benefits, high flexibility, decoupling and good dynamic characteristics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
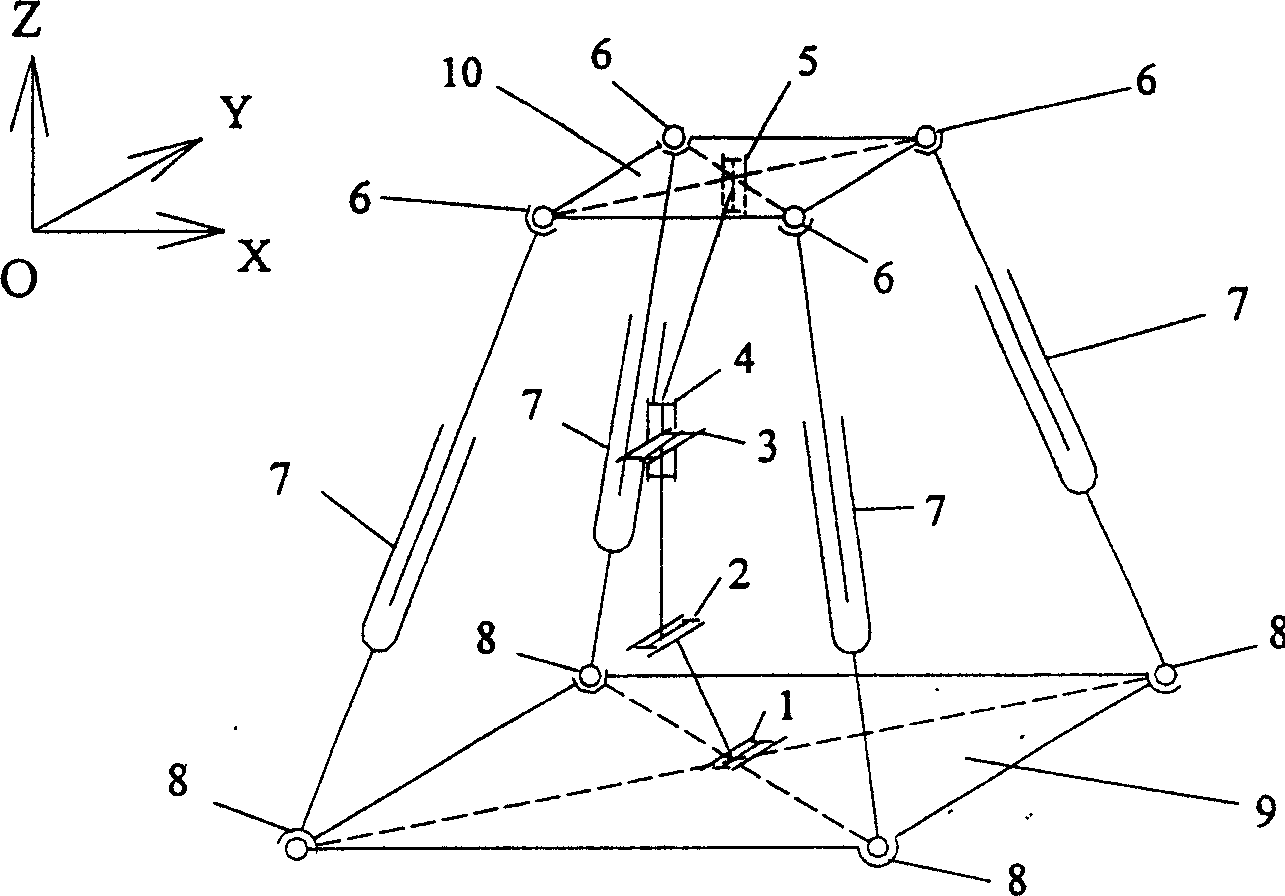
[0017] as attached figure 1 As shown, it is composed of a square fixed platform 9, a rectangular moving platform 10, and five hybrid branches connecting the moving platform 10 and the fixed platform 9, wherein the four branches are the same, connected to the four vertices of the upper and lower platforms, and the other They are different branches connected to the centroids of the upper and lower platforms. The four same branches are composed of ball pairs 6 and 8 and moving pair 7 respectively, and the other different branches are composed of rotating pairs 1, 2, 3, 4, and 5, in which the axes of rotating pairs 1, 2, and 3 are mutually parallel to figure 1 In the Y-axis direction shown, the axes of the rotating pairs 4 and 5 are parallel to each other and parallel to figure 1 The direction of the Z axis is shown, and the axes of the rotating pairs 3 and 4 are perpendicular to each other and intersect at one point (that is, forming a Hooke hinge structure). The four moving p...
Embodiment 2
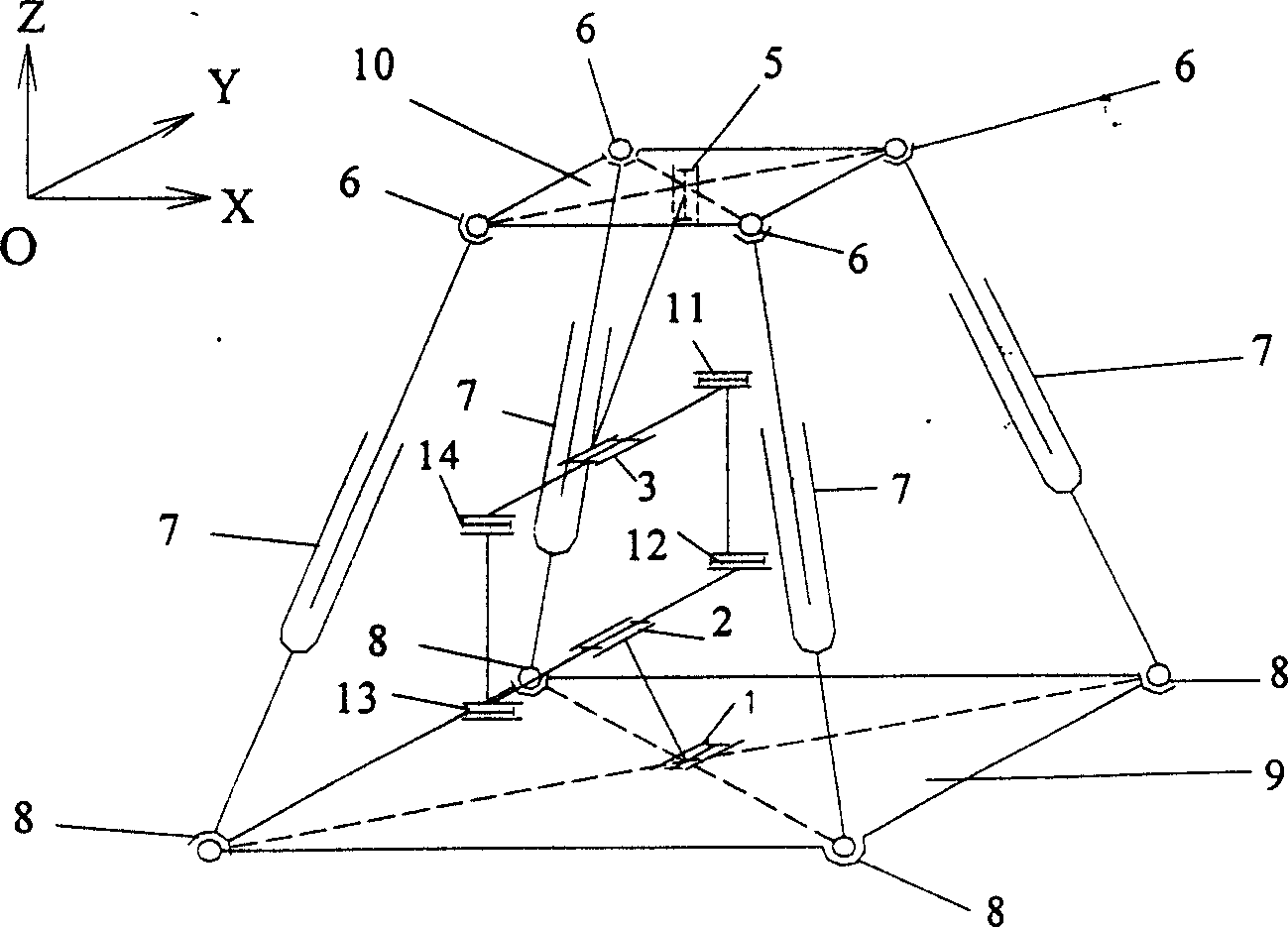
[0019] as attached figure 2 As shown, it consists of a square fixed platform 9, a rectangular moving platform 10, and five hybrid branches connecting the moving platform 10 and the fixed platform 9, wherein the four branches are the same, connected to the four vertices of the upper and lower platforms, and the other They are different branches connected to the centroids of the upper and lower platforms. The four same branches are composed of ball pairs 6 and 8 and moving pair 7 respectively, and the other different branches are composed of rotating pairs 1, 2, 3, 5, 11, 12, 13, and 14, of which rotating pairs 1 and 2 , 3 axes are parallel to each other and parallel to figure 2 In the Y-axis direction shown, the axes of the rotating pairs 11, 12, 13, 14 are parallel to each other and parallel to figure 2 In the X-axis direction shown, the axis of the rotating pair 5 is parallel to the Z-axis direction. The four moving pairs 7 of the same branch are respectively realized b...
Embodiment 3
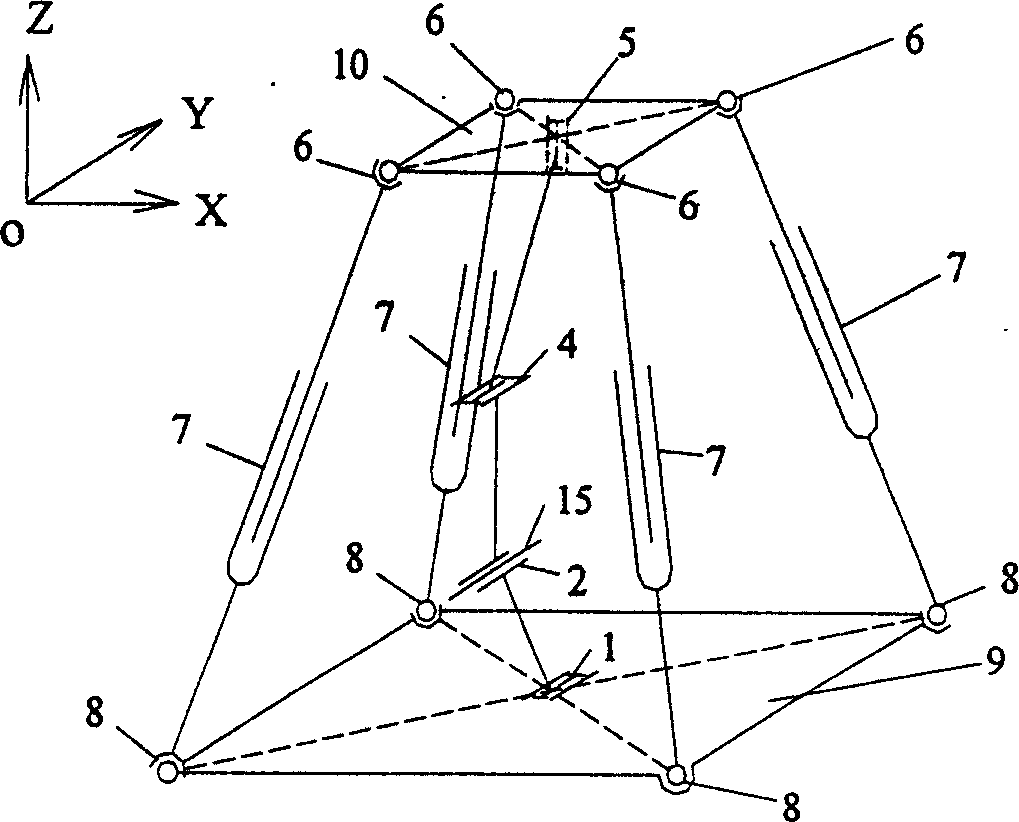
[0021] as attached image 3 As shown, it is composed of a square fixed platform 9, a rectangular moving platform 10, and five hybrid branches connecting the moving platform 10 and the fixed platform 9, wherein the four branches are the same, connected to the four vertices of the upper and lower platforms, and the other They are different branches connected to the centroids of the upper and lower platforms. The four identical branches are respectively composed of ball pairs 6 and 8 and moving pair 7, and the other different branches are respectively composed of rotating pairs 1, 2, 4, 5 and moving pair 15, among which the rotating pairs 1, 2, and 4 are axes parallel to each other and to figure 1 In the Y-axis direction shown, the axial direction of the rotating pair 2 coincides with the moving direction of the moving pair 15 (i.e. forms a cylindrical pair structure), and the axis of the rotating pair 5 is parallel to image 3 The direction of the Z axis is shown. The four mo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com