Walking robot remote-control system, apparatus and method
A technology of remote control device and remote control system, which is applied in the direction of remote measurement/remote control selection device, selection device, signal transmission system, etc., which can solve the problems of huge system, difficult and difficult to grasp the state of feet and so on
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
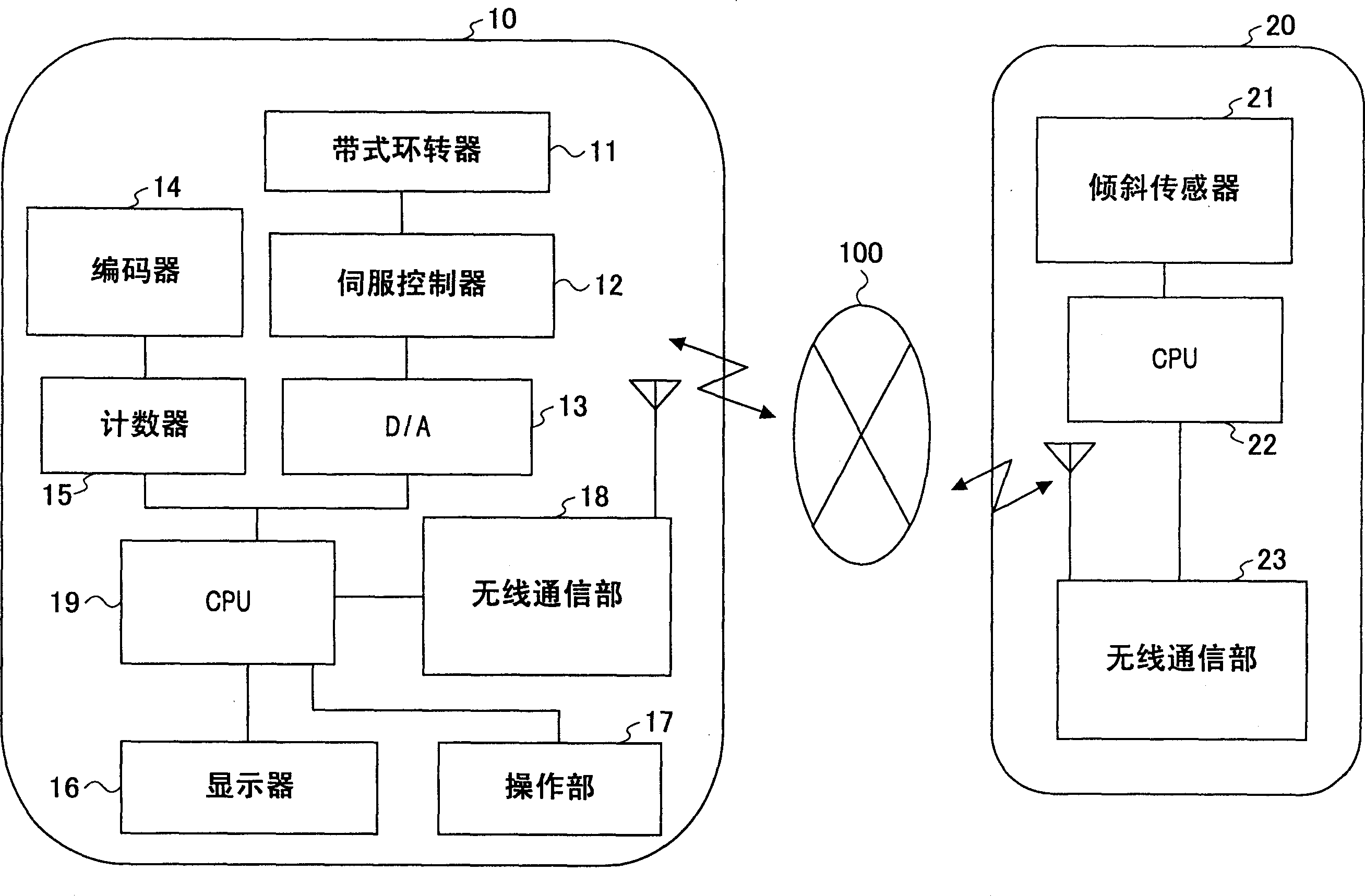
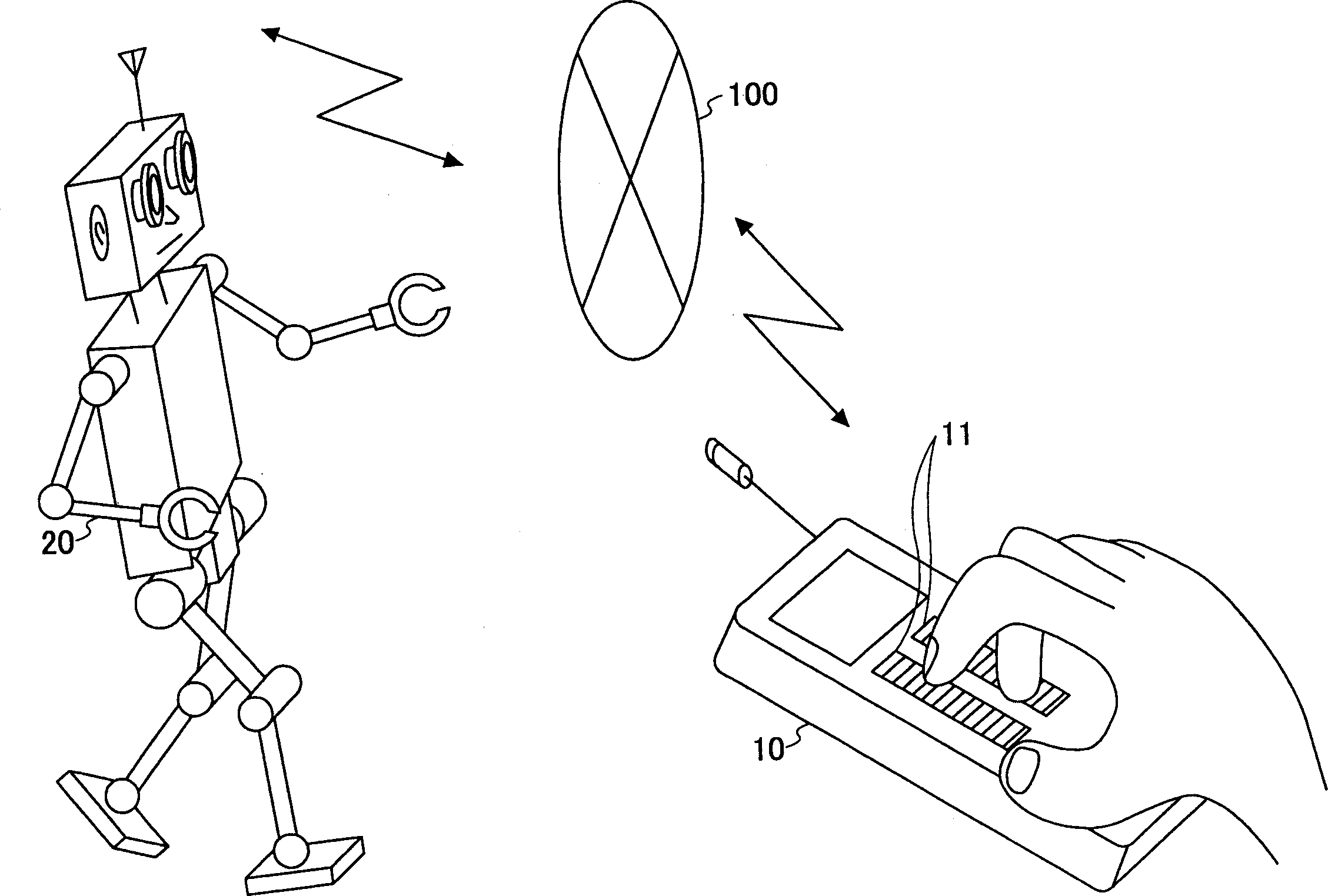
[0033] Fig. 1 illustrates a remote control system for a walking robot with two legs according to Embodiment 1 of the present invention.
[0034] According to FIG. 1 , the remote control system includes: a two-legged walking robot (hereinafter referred to as the robot) 20 , and a portable remote control device 10 that remotely controls the robot 20 through a communication network 100 .
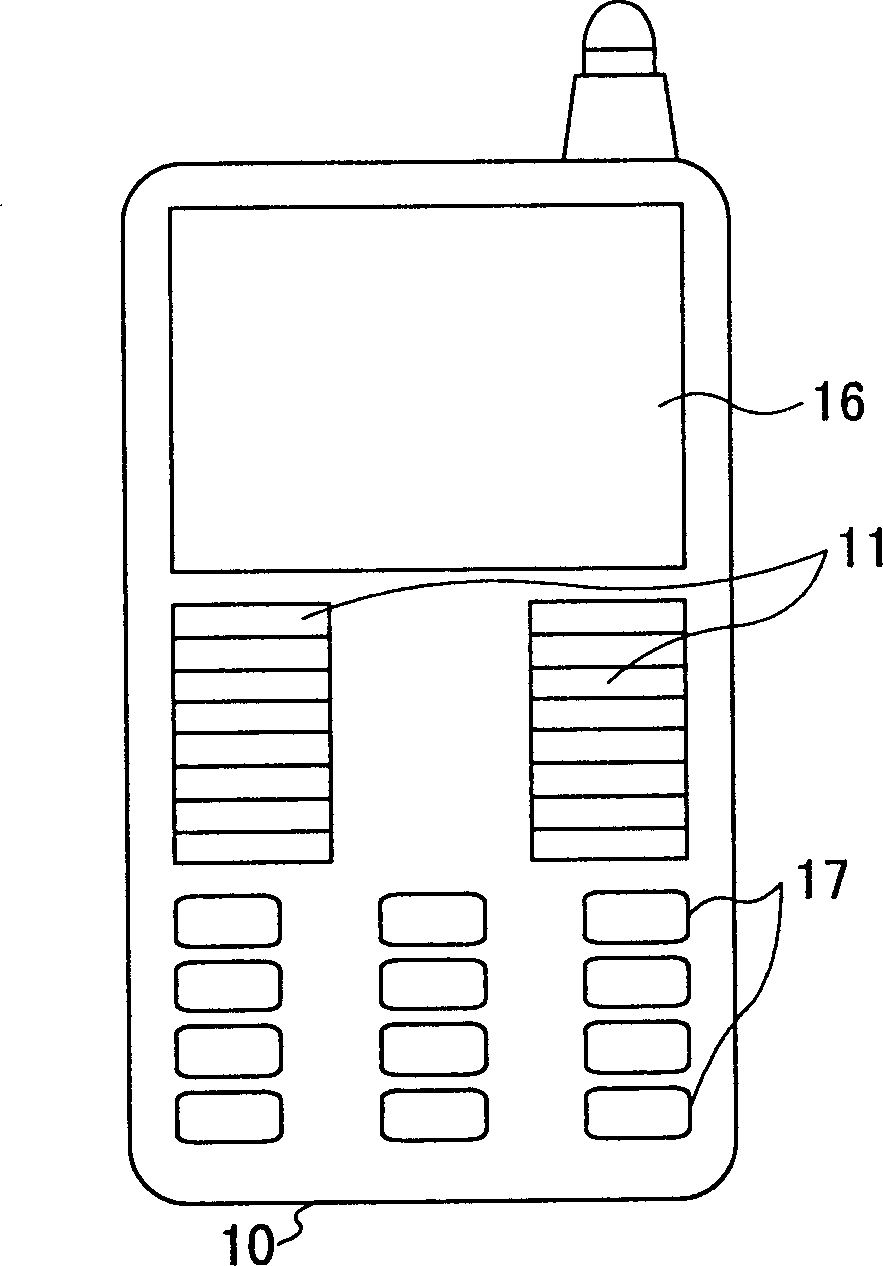
[0035] The remote control device 10 includes: a CPU 19 for overall control, a pair of left and right belt circulators 11 (details will be described later) with a rotating belt mechanism, and a servo that controls the output of the motor that drives the above-mentioned rotating belt mechanism according to the CPU 19 (control unit) instruction. Control unit 12, D / A 13 for digital-to-analog conversion to the output of servo control unit 12, encoder (encoder) 14 for detecting the rotation angle / speed / direction of the above-mentioned motor, counter 15 for calculating the output pulse number of encode...
Embodiment 2
[0073] refer to Figure 11 Embodiment 2 of the present invention will be described. According to the present embodiment 2, the remote control device 10 does not have the belt type circulator 11, and instead installs Figure 11 Shown is a pair of left and right rollers 50, according to which also the robot with two legs can be remotely controlled. This can further be broken down into several forms such as: Figure 11 The form shown on the left is convenient for operating the left and right rollers with the thumbs of both hands; Figure 11 The form shown on the right is easy to operate the left and right rollers with one hand. Under the latter form, make the distance between the left and right rollers within the scale range that can be operated with one hand, so that it can be operated only by the thumb of the right hand (dominant hand).
[0074] The remote control device can also adopt other forms, such as a gear mechanism for volume adjustment on a pair of portable audio devic...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com