Hydraulic spiral longitudinal joint of robot
A robot and joint technology, applied in the field of longitudinal joints, can solve problems such as poor accuracy, small torque, and unstable motion.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
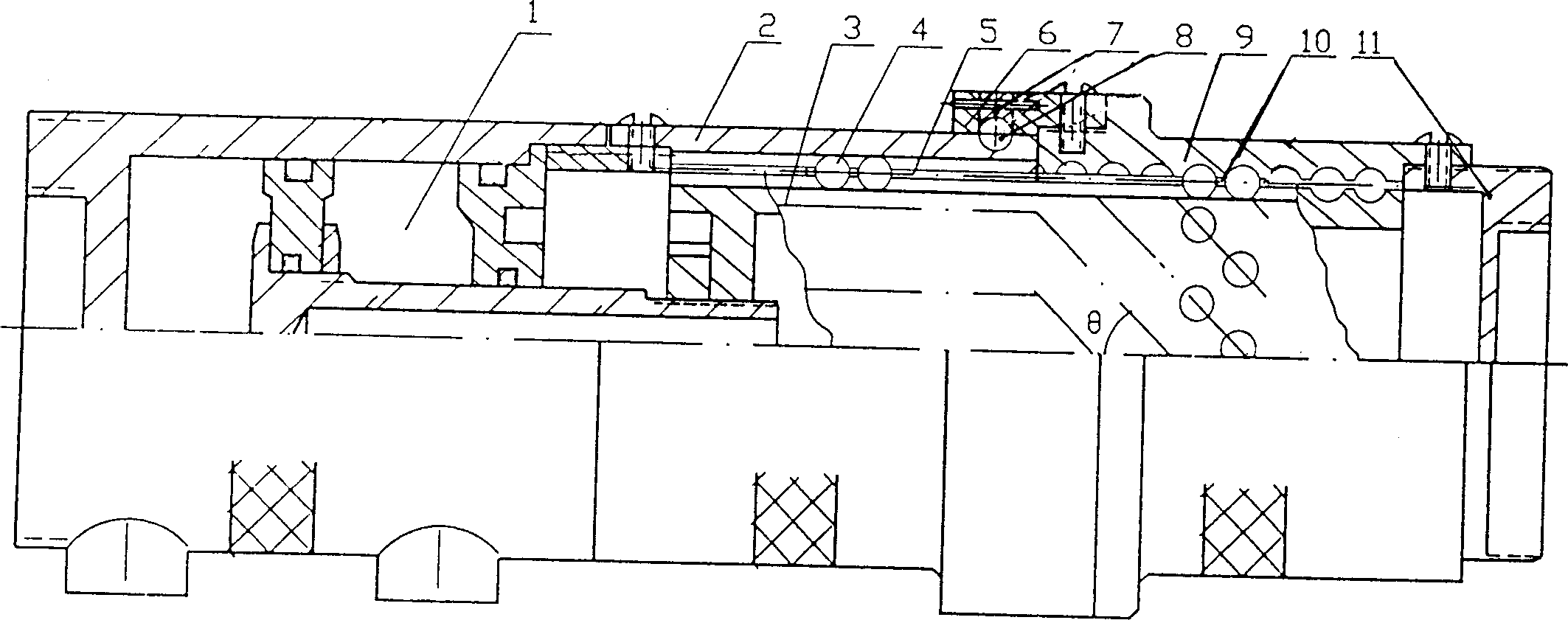
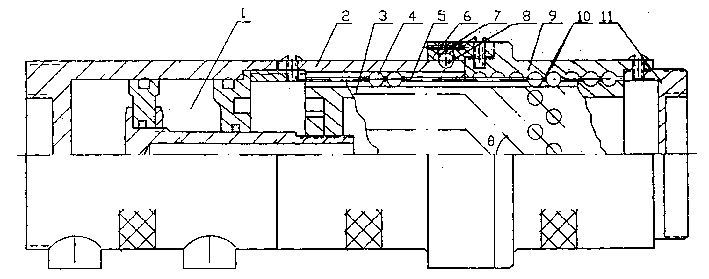
[0010] The specific embodiments of the present invention will be further described below with reference to the accompanying drawings.
[0011] In the drawings, the rolling spline pair includes a spline sleeve (2), a spline shaft (3) and a steel ball (4) in the spline groove, wherein the steel ball is also located in the hole of the synchronous sleeve. The synchronous sleeve with holes ensures the synchronization of the steel ball movement, so that the steel balls can move forward and backward in an orderly manner in their respective grooves. The design makes the steel balls just move to the two end faces of the pair, thus eliminating the need for complicated return. bead body. Part (1) is an oil cylinder. When the oil cylinder enters the oil, the piston rod pushes the shaft (3) to move axially. The shaft (3) is composed of a straight spline section and a helical section. Since the spline sleeve (2) is fixed on the cylinder up, stay still. Therefore, the effect of the rolling...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com