Map processing method and device, robot and storage medium
A processing method and map technology, applied in the field of image processing, can solve the problems of map image lines messy, unsightly, map information display is not intuitive, etc., to achieve the effect of beautifying the outline and improving the aesthetics
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
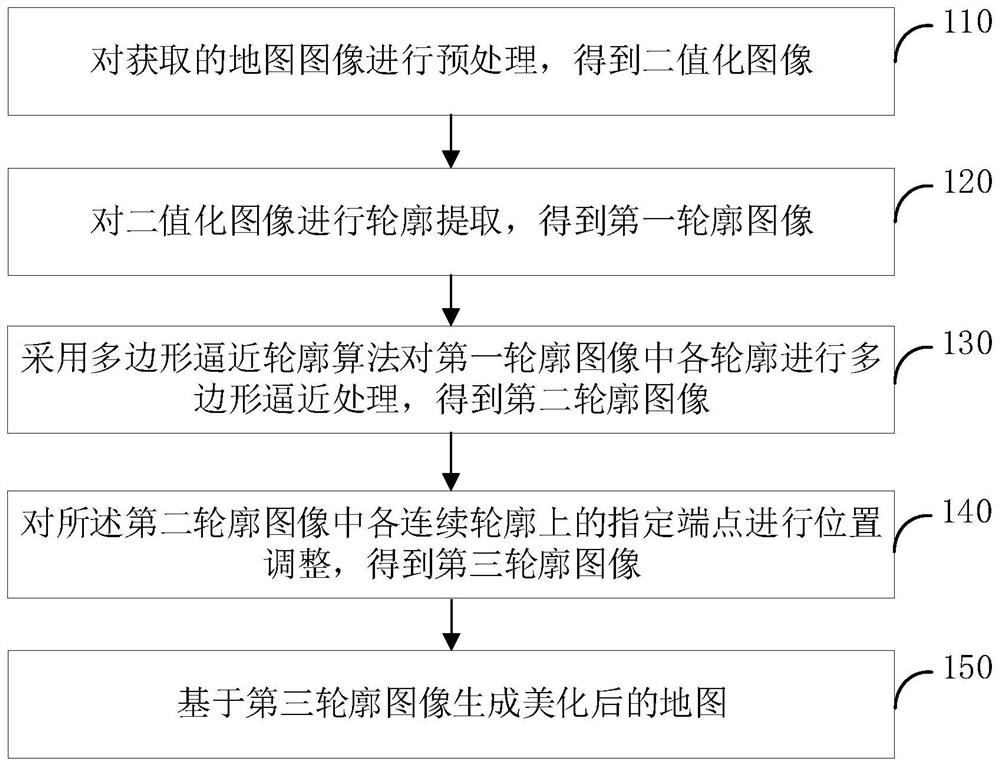
[0065] An embodiment of the present invention provides a map processing method, which is applied to a robot. Please refer to figure 1 , the map processing method will be described in detail below.
[0066] S110: Preprocess the acquired map image to obtain a binarized image.
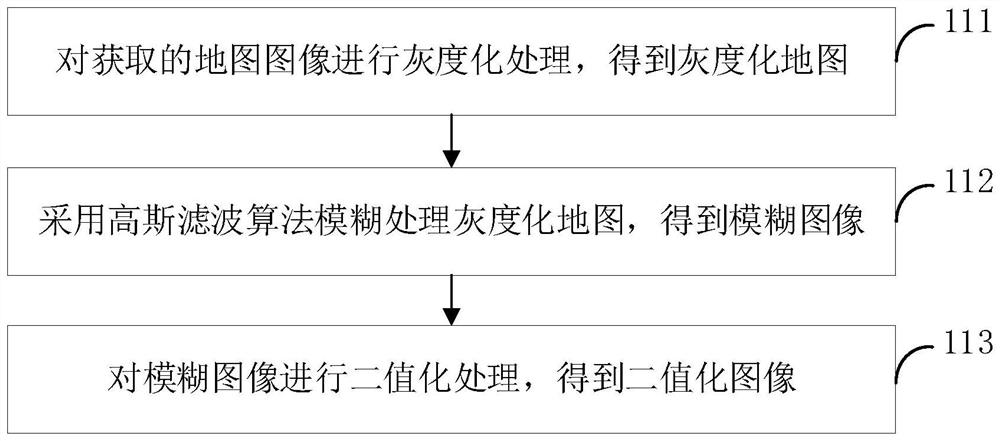
[0067] In a possible implementation, as figure 2 As shown, step S110 may specifically include the following steps:
[0068] S111 , performing grayscale processing on the acquired map image to obtain a grayscale map.
[0069] S112 , using a Gaussian filter algorithm to blur the grayscale map to obtain a blurred image.
[0070] S113: Perform binarization processing on the blurred image to obtain a binarized image.
[0071] The robot can obtain raw map images through sensors and the Slam algorithm, such as image 3 As shown in the original map image (the original image is in color), there are many burrs on the black edge of the wall in the original map image; the wall is not straight or flat, that is, ...
Embodiment 2
[0099] Please refer to Figure 12 , the embodiment of the present invention also provides a map processing device, the device includes:
[0100] The preprocessing module 11 is used for preprocessing the acquired map image to obtain a binarized image;
[0101] an outline extraction module 12, configured to perform outline extraction on the binarized image to obtain a first outline image;
[0102] The polygon approximation processing module 13 is configured to use the polygon approximation contour algorithm to perform polygon approximation processing on each contour in the first contour image to obtain a second contour image;
[0103] The contour adjustment module 14 is configured to adjust the position of the designated endpoints on each continuous contour in the second contour image to obtain a third contour image, wherein the continuous contour includes a plurality of non-collinear continuous line segments, and the The specified endpoint is the endpoint of the continuous li...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com