


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Multi-robot continuous monitoring method and non-temporary computer readable storage medium
A multi-robot and robot technology, applied in the field of non-temporary computer-readable storage media, can solve problems such as danger, inability to completely avoid obstacles, and huge manpower consumption, achieve good consistency, and increase the minimum access frequency and access frequency Tendency and good adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
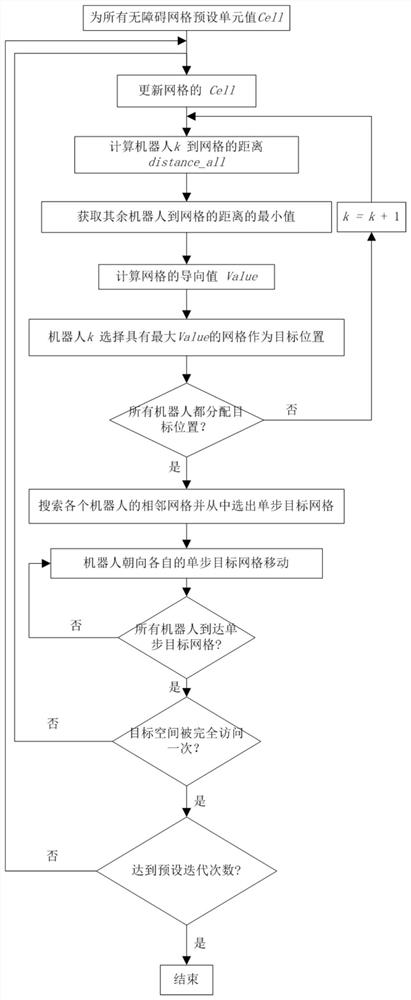
[0072] According to the multi -robot continuous monitoring method of the embodiments of the present invention, including the following steps:
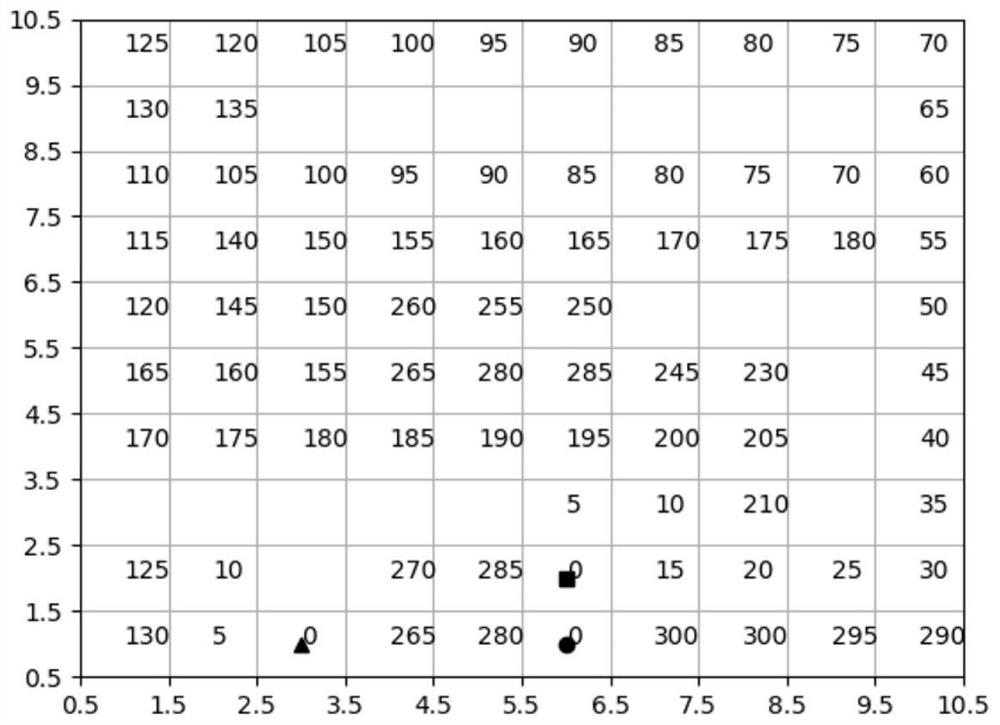
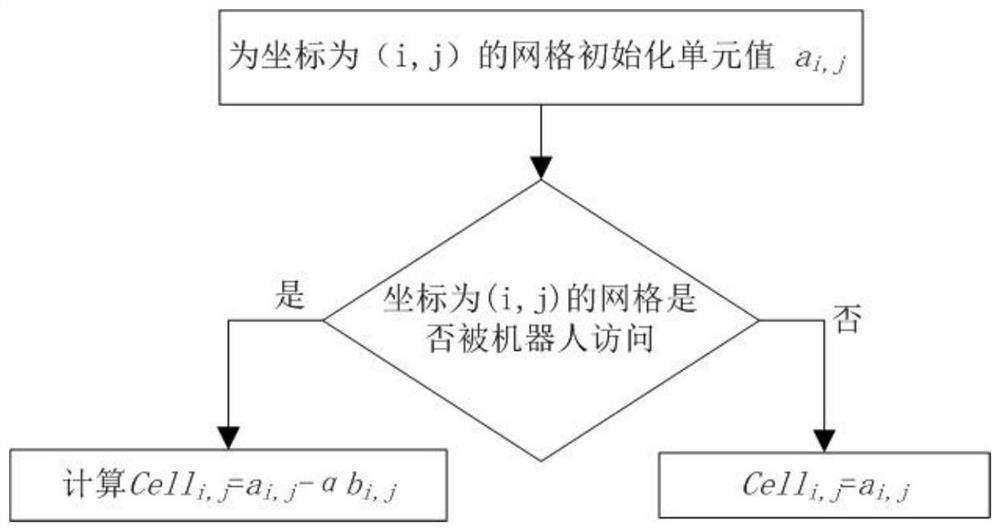
[0073] S1, the establishment of the XOY coordinate system, the coordinates of the center of the grid are (i, j), the current position CAR_POS of the robot, the position of the obstacles OBS_POS, the unit value CELL of each grid, each robot and each network The distance between the grids, the movement speed VEL of each robot, the orientation value of each robot, the target position OPT_COUNT, the target position of each robot. For example, Car_POS, OBS_POS, OPT_COUNT are all sets of coordinate points, Cell is 10 × 10 arrays, and the distribution of distance_all and value is 3 × 10 × 10 arrays, respectively, each layer corresponds to a robot data.
[0074] S2, calculate the orientation value of each robot based on the following formula:
[0075] if (i, j) in OBS_POS:
[0076] V i,j = -Inf or v i,j = Nan
[0077] else:
[0078]
[0079] In ...
Embodiment 2
[0094] According to the multi -robot continuous monitoring method of another embodiment of the present invention, including the following steps:
[0095] S1, the establishment of the XOY coordinate system, the coordinates of the center of the grid are (i, j), the current position CAR_POS of the robot, the position of the obstacles OBS_POS, the unit value CELL of each grid, each robot and each network The distance between the grids, the movement speed VEL of each robot, the orientation value of each robot, the target position OPT_COUNT, the target position of each robot.
[0096] S2, calculate the orientation value of each robot based on the following formula:
[0097] if (i, j) in OBS_POS:
[0098] V i,j = -Inf or v i,j = Nan
[0099] else:
[0100]
[0101] In the formula, v i,j The guide value corresponding to the grid of the coordinates (i, j), cell i,j The unit value corresponding to the grid of the coordinates (i, j), ω 0 Ω 1 The weighted coefficient, Δ kj It is the distanc...
Embodiment 3
[0111] like Figure 8 It is shown that there are 3 mobile robots. The two -dimensional plane areas are evenly divided into 15 × 17 grids. Each grid is a square with a edge length of 1. Channels and / or intersections have multiple gears to form a maze environment. Straight lines with points, triangles and blocks in the figure represent the path of mobile robots. The minimum width of the channel or intersection is 2, and each enclosure occupies one or more grid edges. The robot is located at the apex of the grid and moves along the side length of each grid to the apex of the adjacent grid. The robot is The monitoring range of the sensor is in the direction of its forward direction.
[0112] S1, the coordinate of the apex of the grid distributed in the coordinate system is (i, j), the current position CAR_PS_POS, the unit value of each grid, each grid, each grid, each grid, each grid. The distance between the robot and each grid, the movement speed VEL of each robot, the cell is 15 × 1...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com