Tomato picking method and system of binocular robot based on YOLOv4 algorithm
A robot and binocular camera technology, applied in computer parts, instruments, calculations, etc., can solve problems such as economic loss, inaccurate target capture, and inability to plan the robot arm well, and achieve accurate identification and positioning Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment
[0055] like Figure 1-Figure 3 As shown, in the first aspect, an embodiment of the present invention provides a tomato picking method for a binocular robot based on the YOLOv4 algorithm, including the following steps:
[0056] S1. Acquire and classify and mark the occlusion degree of the tomato image sample data to establish a sample data set of multiple occlusion degree categories;
[0057] In some embodiments of the present invention, three different data sets are selected according to the different shaded areas of ripe tomato fruits, and the tomatoes are approximately regarded as circles. Occlusion comparison and selection, classify the selected tomatoes, in which the occlusion area of tomatos is less than or equal to 25%, the occlusion area of tomatoh is about 50%, and the occlusion area of tomatom is ≥75%. The total amount of raw data that meets the requirements is 1200, so that the ratio of the three shaded tomatoes is 1:1:1.
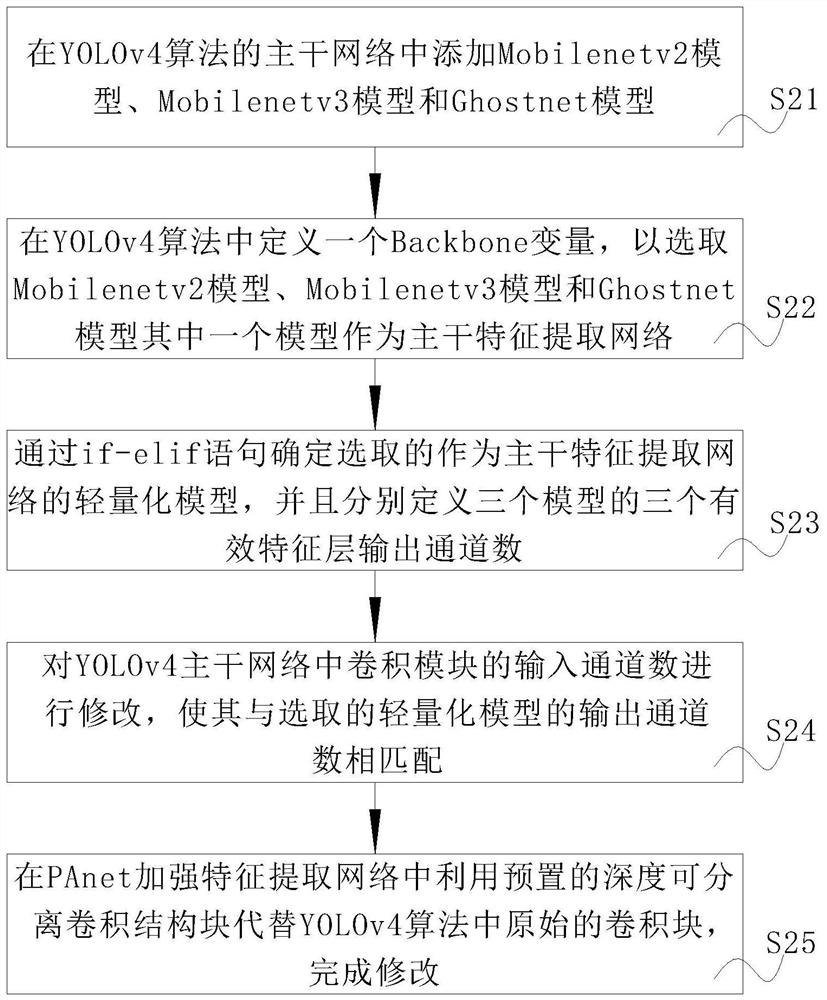
[0058] S2. Lightweight the YOLOv4 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com