Four-branch-chain parallel mechanism neck rehabilitation training robot and force control method thereof
A technology of rehabilitation training and four-branched chains, applied in passive exercise equipment, physical therapy, etc., can solve the problems of limited head and neck movement adaptability, inability to realize dynamic compound loading training, and reduce the labor intensity of medical staff. The effect of miniaturized dynamic multi-degree-of-freedom traction loading capacity, reducing procrastination, and improving the efficiency of medical diagnosis and treatment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
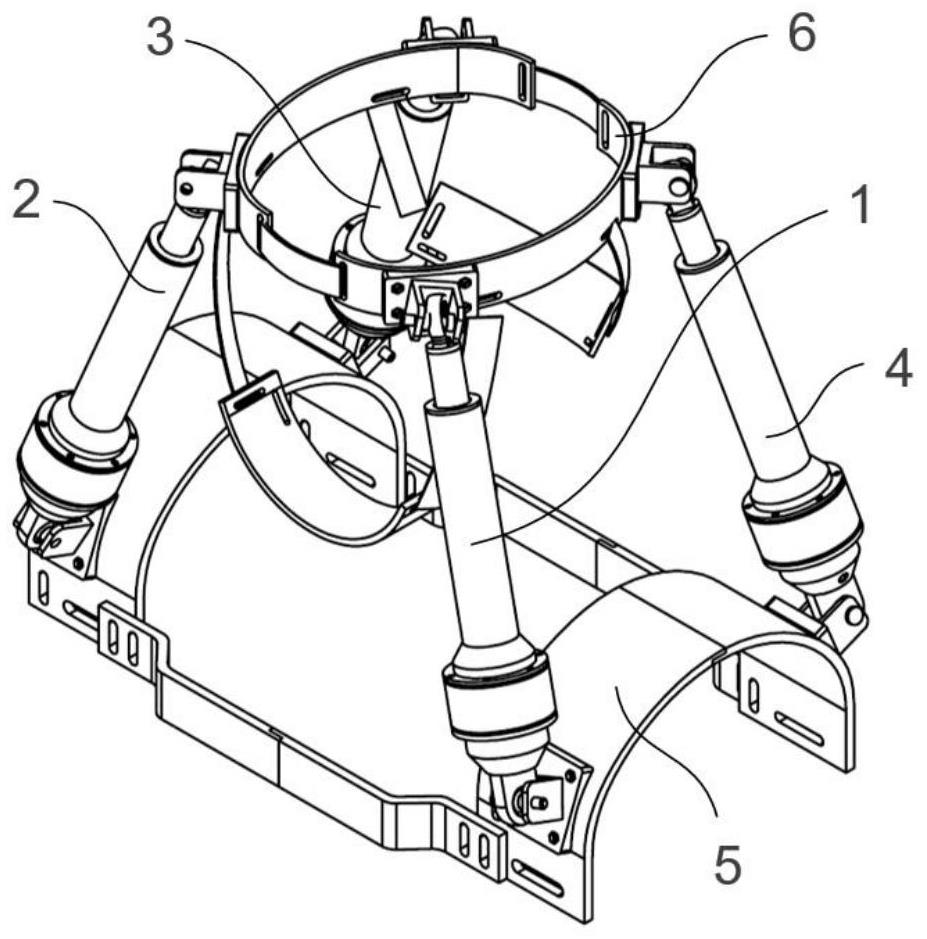
[0058] Combine the following Figure 1-Figure 6 The present invention will be described in further detail.
[0059] like Figure 1-Figure 4 , a four-chain parallel mechanism neck rehabilitation training robot, comprising a first actuator 1, a second actuator 2, a third actuator 3, a fourth actuator 4, a shoulder fixing module 5, and a head fixing module 6 ;
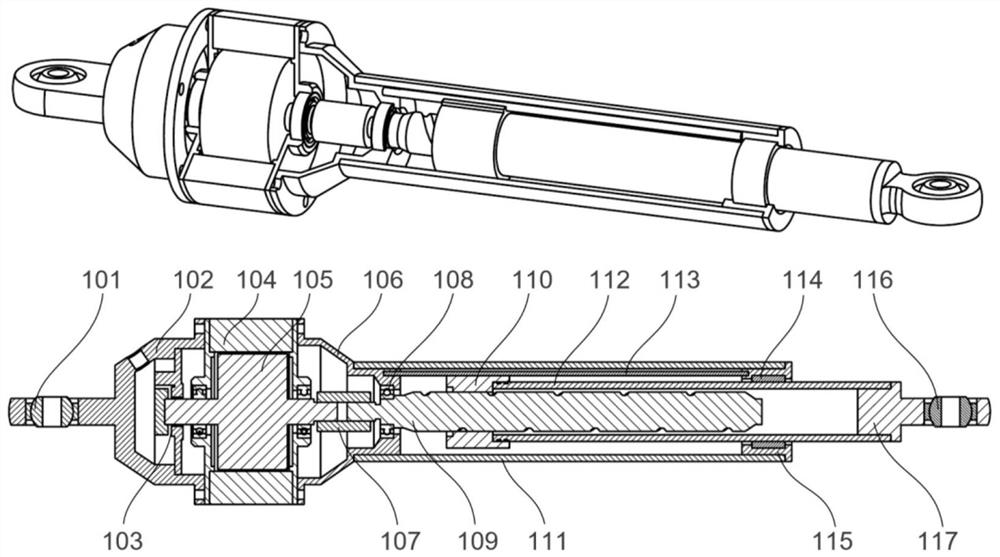
[0060] The first actuator 1 , the second actuator 2 , the third actuator 3 and the fourth actuator 4 include a motor stator 104 , a motor mover 105 , a housing connector 106 , a shaft coupling 107 , and a lead screw bearing 108 , lead screw 109, lead screw nut 110, cylindrical housing 111, hollow output shaft 112, output shaft anti-rotation rod 113, linear bearing 116, linear bearing seat 117;
[0061] One end of the housing connector 106 is fixedly installed with the end face of the motor stator 104, and the other end is fixedly installed with the cylindrical housing 111, so that the axes of the motor and the cylindri...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com