Long-distance laser light path calibration system and method based on machine vision
A machine vision and optical path calibration technology, applied in the field of laser calibration, can solve the problems of difficult automatic adjustment of the laser and laser irradiation at the target position, etc., to achieve the effect of low cost and improve the degree of automation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
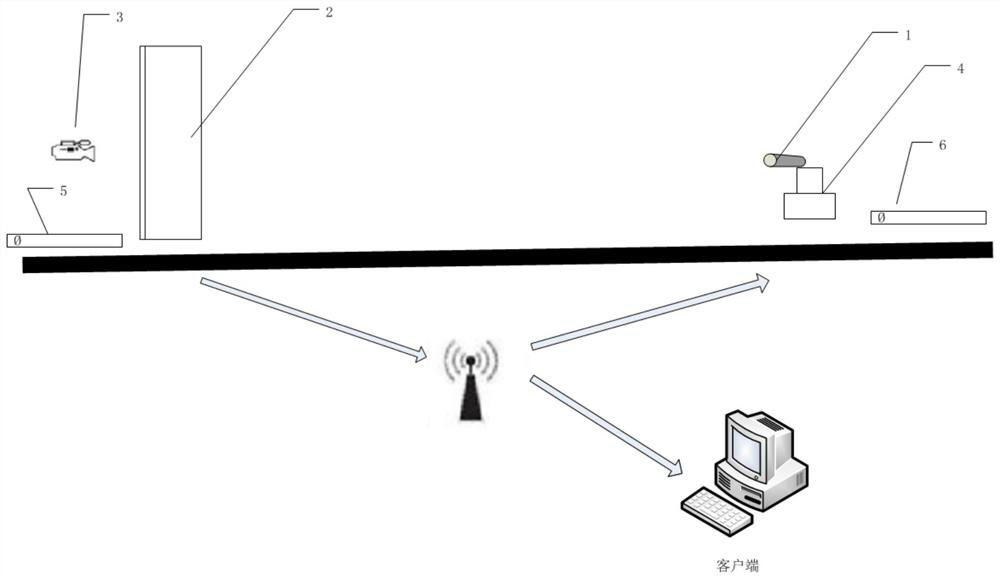
[0034] The invention provides a long-distance laser optical path calibration system based on machine vision, comprising: a laser 1, used for emitting a laser beam; a target surface 2, used for receiving the laser beam of the laser; a camera 3, used for taking pictures of light spots; The machine 4 is used to control the position of the laser; the first adjustment control module 5 is used to obtain the position of the light spot and the error between the light spot and the center of the target surface 2; the second adjustment control module 6 is used to control the steering gear 4 through the error. Adjust the position of the laser 1; the laser spot is generated by the laser 1, and the laser spot is presented on the target surface 2. The side of the target surface 2 away from the laser 1 is provided with a camera 3. The camera 3 collects the spot image on the target surface 2, and the laser 1 is fixed On the steering gear 4 , the first adjustment control module 5 , the second ad...
Embodiment 2
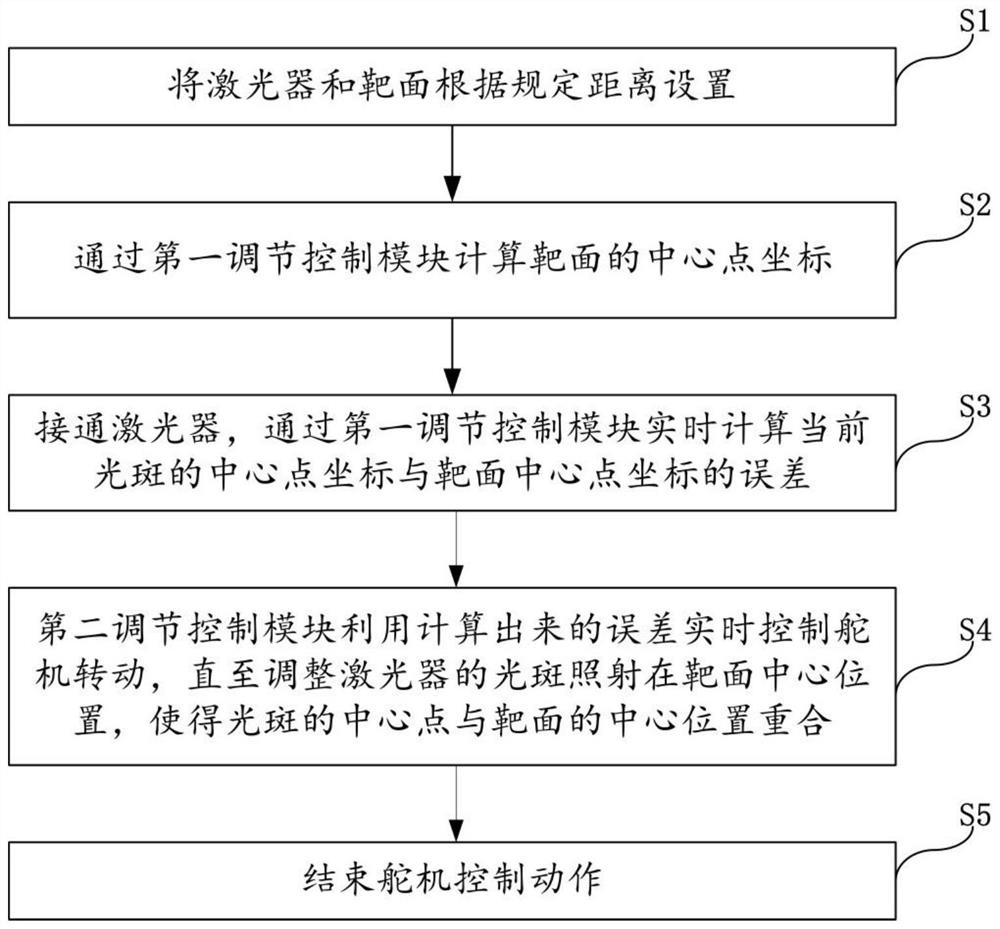
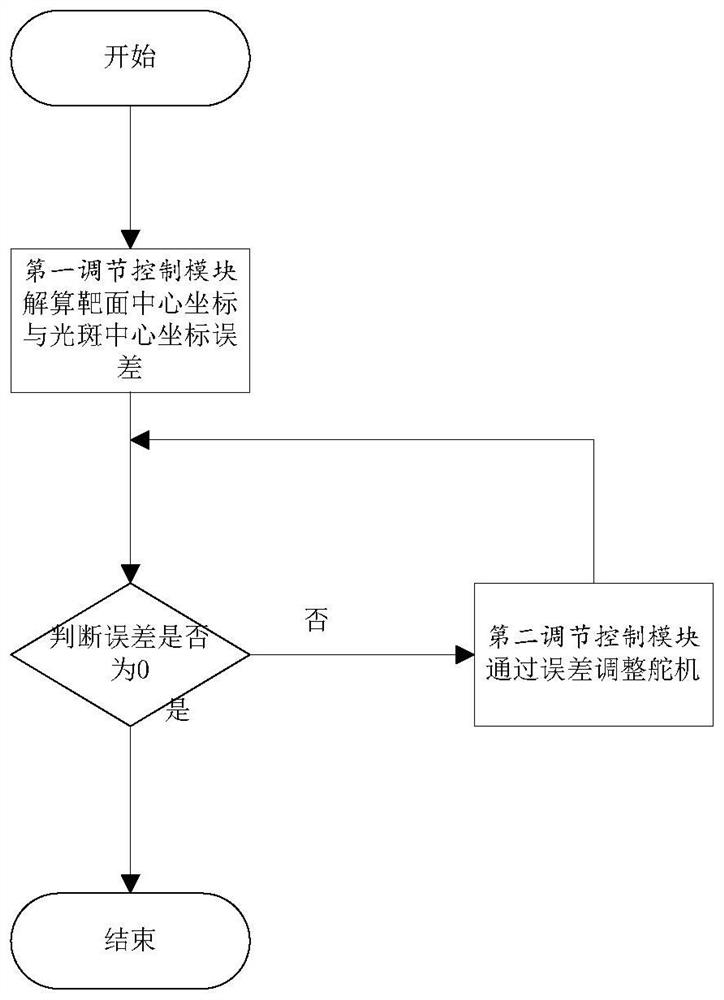
[0042] like figure 2 As shown, based on the system provided in the first embodiment, the present invention also provides a long-distance laser optical path calibration method based on machine vision, including the following steps:
[0043] Step S1, set the laser and the target surface according to the specified distance;
[0044] Step S2, calculating the coordinates of the center point of the target surface through the first adjustment control module;
[0045] Step S3, turn on the laser, and calculate the error between the coordinates of the center point of the current spot and the coordinates of the center point of the target surface in real time through the first adjustment control module;
[0046]Step S4, the second adjustment control module uses the calculated error to control the rotation of the steering gear in real time, until the spot of the adjustment laser is irradiated on the center position of the target surface, so that the center point of the spot coincides wit...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com