Quadrotor sliding mode anti-interference control method based on acceleration feedback
A control method and quad-rotor technology, applied in attitude control, three-dimensional position/channel control, sustainable traffic and other directions, can solve the problems of differential explosion, many active disturbance rejection control parameters, inaccurate disturbance estimation, etc. Frequency buffeting, avoid coupling and inaccurate estimation, achieve simple effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0095] The present invention will be further described with reference to the following application scenarios.
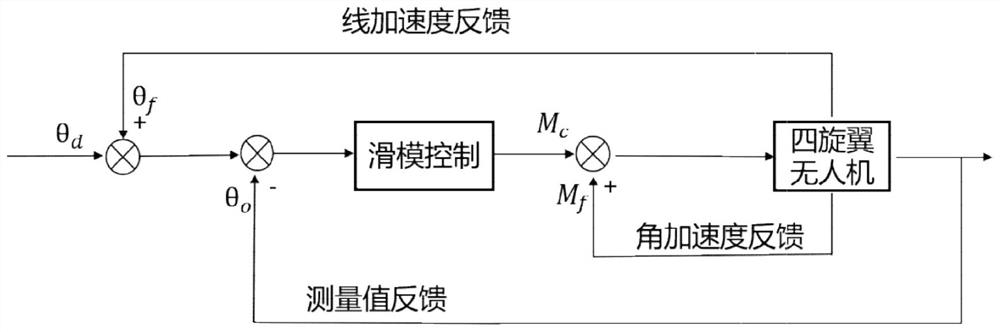
[0096] The present invention proposes a quadrotor sliding mode anti-disturbance controller, which is used to realize a quadrotor sliding mode anti-interference control method based on acceleration feedback. The principle block diagram of the proposed quadrotor sliding mode anti-disturbance controller is as follows: figure 1 shown; figure 1 in, θ d is the desired attitude angle, θ f is the linear acceleration feedback term, θ o is the observation angle, M c Calculated torque for the sliding mode controller, M f Feedback torque for angular acceleration.
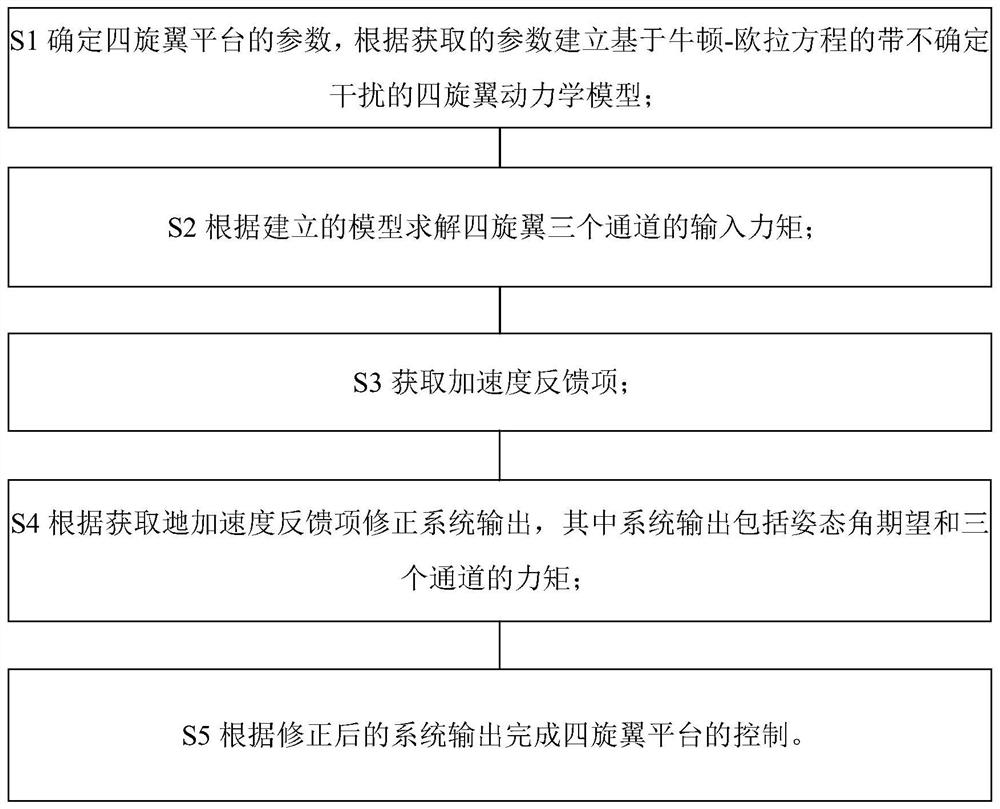
[0097] Among them, the proposed quadrotor sliding mode anti-interference control method based on acceleration feedback, see figure 2 , the method includes:
[0098] S1 determines the parameters of the quadrotor platform, and establishes a quadrotor dynamics model with uncertain disturbance based on the Newton-...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com