Double neural network friction compensation and finite time cooperative control method for motor servo system
A dual neural network and servo system technology is applied in the fields of dual neural network friction compensation and limited-time cooperative control of motor servo systems, and can solve problems such as difficulty in determining the precise model of friction links.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
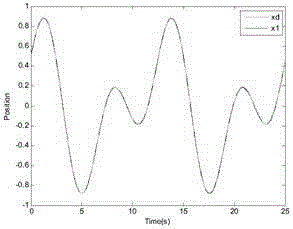
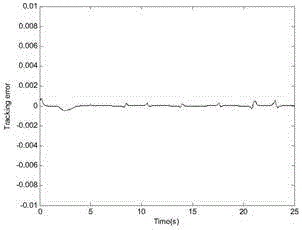
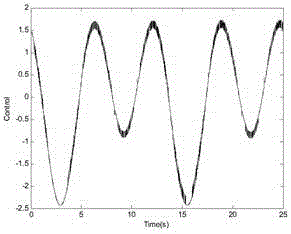
[0065] Refer to attached Figure 1-5 , the dual neural network friction compensation and finite-time cooperative control method for the motor servo system, including the following steps:
[0066] Step 1, establish the motor servo system model shown in formula (1), initialize the system state and related control parameters;
[0067] m x · · = - K f x + u ( t ) - F - - - ( 1 )
[0068] Among them, m is the effective mass; x is the state variable, indicating the position of the motor rotor; u(t) is the control signal, indicating the voltage changing with time; K f is the damping coefficient, which is a constant value parameter; F is the unknown nonlinear friction force.
[0069] Step 2, establish a LuGre model of nonlinear friction force, and divide ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com