


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
All-terrain mobile robot controller based on 5G cloudization and scheduling system thereof
A mobile robot, all-terrain technology, applied in control/adjustment systems, non-electric variable control, two-dimensional position/channel control, etc., can solve problems such as inability to change attitude, different motor output torques, and changing suspension stiffness. , to achieve the effect of strong adaptability, high communication speed and stable signal
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0047] In order to make the technical means, creation features, achievement goals and effects of the present invention easy to understand and understand, the present invention is further described below with reference to the accompanying drawings and embodiments.
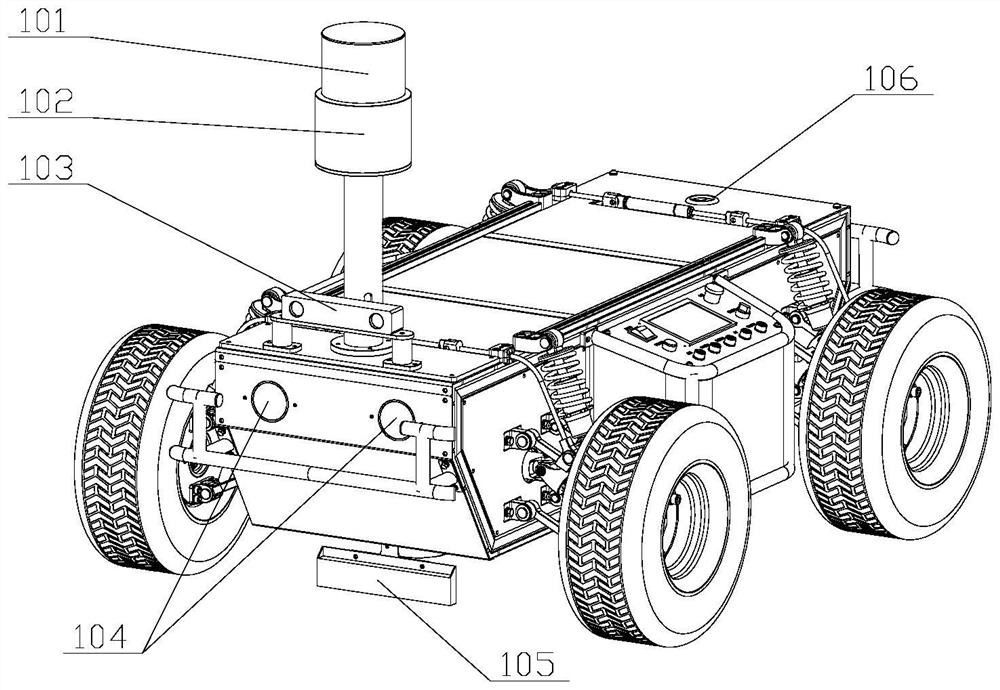
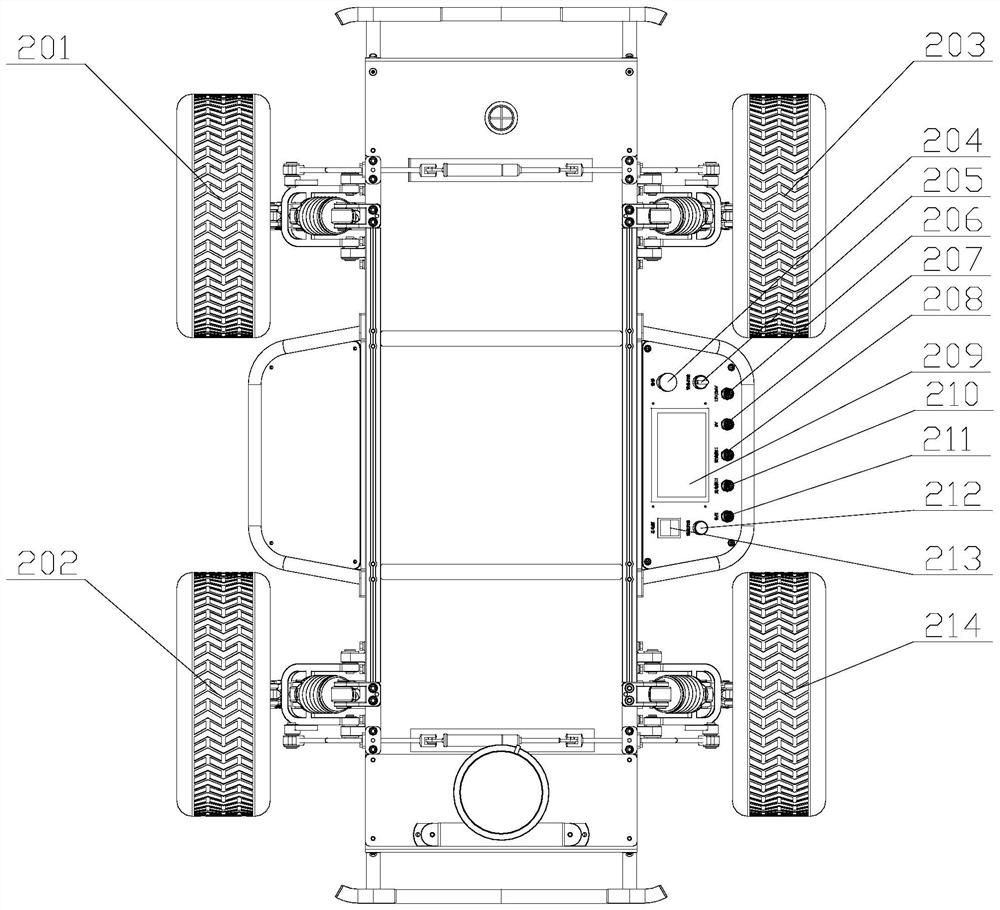
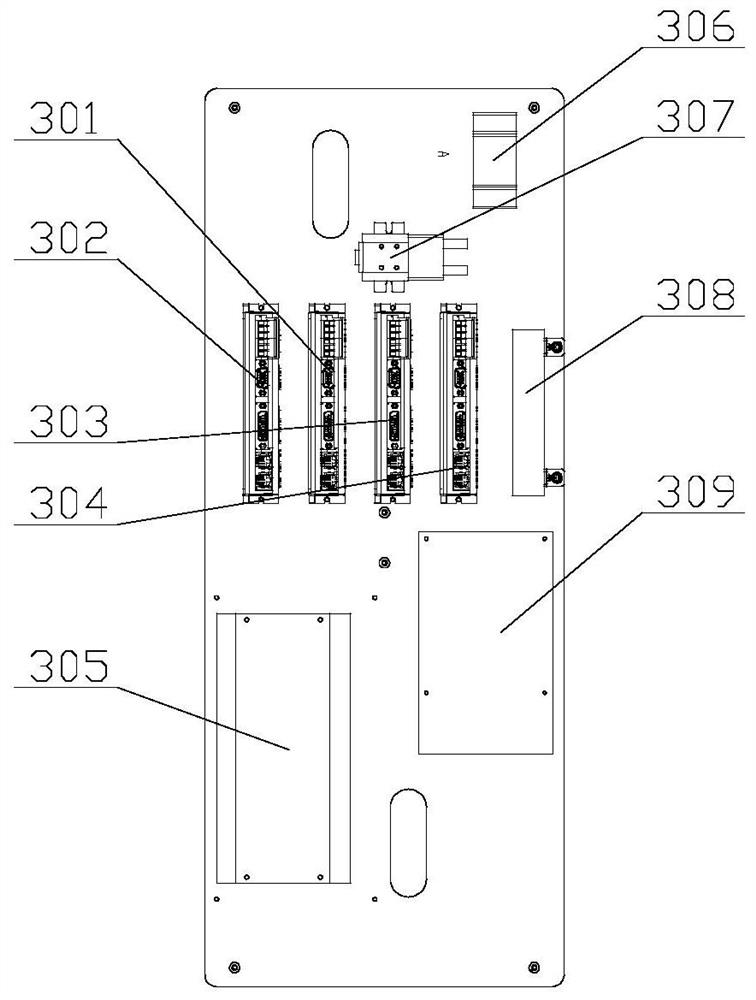
[0048] like Figure 1 to Figure 6 As shown, the 5G cloud-based all-terrain mobile robot controller includes an all-terrain mobile robot, a mobile robot controller 305 and a 5G communication processing controller 309 arranged inside the all-terrain mobile robot.
[0049] Specifically, as figure 1 and Figure 4As shown, a GPS positioning sensor 101 and a lidar sensor 102 are installed on the support rod at the upper end of the vehicle body of the all-terrain mobile robot; a binocular vision sensor 103 is installed on the upper side of the vehicle body of the all-terrain mobile robot, Two headlights 104 are also installed at the front of the vehicle body to facilitate lighting at night or when the outside light is di...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com