Improved RRT path planning method based on pathfinder algorithm
A path planning, pathfinder technology, applied in the directions of road network navigators, navigation, instruments, etc., can solve the problems of non-optimal paths, increased search time, lack of targetness, etc., to reduce path sampling nodes and shorten paths. length, avoid random effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0119] In step 1, the binary image is a digital matrix of 300*300; the digital matrix only contains two numbers of 0 and 1, and 0 represents the obstacle space X obs , 1 means free space X free ;
[0120] Image 6 , the black part represents the static obstacle, and the blank part represents the free space X free; initial point X t Represented by a triangle, the target point X g Represented by a square; static obstacles are randomly distributed with different sizes, and the coordinates of the center points of the obstacles are [23.0, 7.0], [10.0, 7.0], [5.0, 20.0], [22.0, 20.0], [15.0, 27.0] ], [14.0, 15.0], the radius of the obstacle is 5.0, 5.0, 4.0, 4.5, 2.0, 1.5;
[0121] Step 2. Given the initial point X of the robot in the workspace C t [0,0] and the target point X g [30,30];
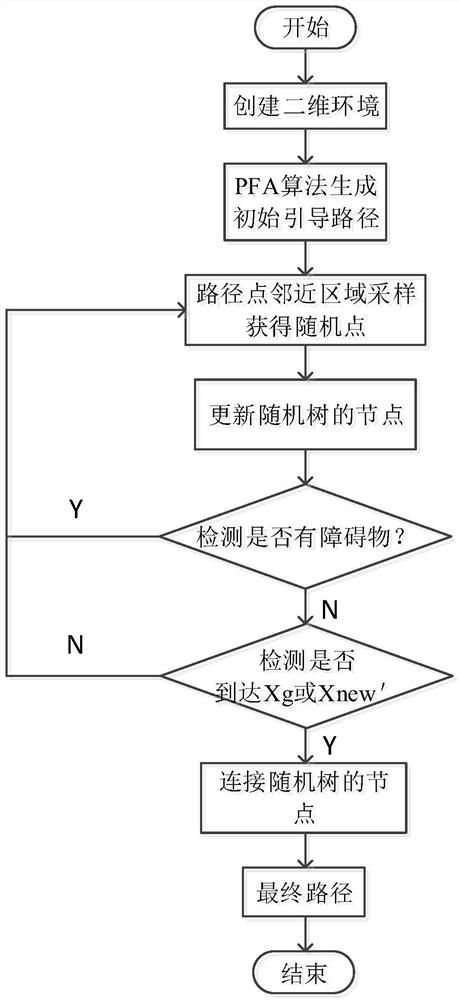
[0122] Step 3. Take the initial point X given in step 2 t [0,0] is the starting point, and an optimal guiding path is generated based on the PFA algorithm; the maximum number of iteration...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com