


Quick Research
Generate reliable direction feasibility study reports for your R&D in just a few steps.

Technical Q&A
Discover and master advanced knowledge NOW. Basics, ideas, possibilities, all at once.

Find Solutions
As an expert in R&D theories, this can generate solutions to your technical problems instantly.

Evaluate Feasibility
Analyze your overall solution with one click, know your potential R&D risks in advance.

Monitor Landscape
Get weekly tech updates, stay abreast of the latest tech innovations and key insights.
Satellite-borne multi-beam laser range finder in-orbit non-field orientation calibration method
A laser rangefinder and laser pointing technology, applied in radio wave measurement systems, instruments and other directions, can solve problems such as difficulty in target laying, and achieve the effect of solving the difficulty of target laying
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
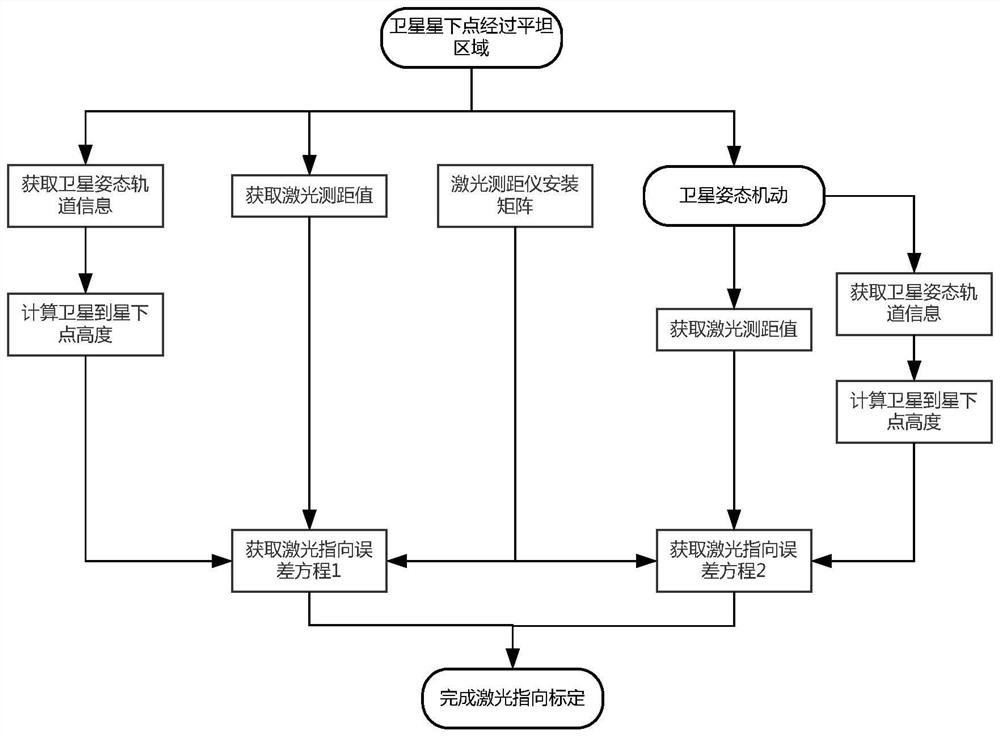
[0069] In this embodiment, a space-borne multi-beam laser rangefinder on-orbit field-free pointing calibration method is disclosed. A flat area is selected, and different attitude maneuvers are performed through satellites, and the obtained satellite attitude orbit information and different maneuvering conditions are used. The laser ranging value below is processed to obtain the laser pointing error.
[0070] Such as figure 1 , the on-orbit field-free pointing calibration method of the spaceborne multi-beam laser rangefinder, including:
[0071] Step 1, select the calibration area. The selected calibration areas are flat terrain areas, including but not limited to: oceans, lakes, plains and grasslands.
[0072] Step 2, obtain the theoretical pointing angle of the multi-beam laser rangefinder. Among them, the theoretical pointing angle of the multi-beam laser range finder can be determined through the installation matrix of the multi-beam laser range finder.
[0073] Step 3...
Embodiment 2
[0081] In this embodiment, the on-orbit field-free pointing calibration method of the spaceborne multi-beam laser rangefinder includes:
[0082] Step 1, select the calibration area.
[0083] In this embodiment, the Caspian Sea is selected as the area used for calibration. By querying the weather information, the weather in the Caspian Sea is clear without cloud cover, and the sea surface is less windy and the wave height is less than 1m.
[0084] Step 2, obtain the theoretical pointing angle of the multi-beam laser range finder.
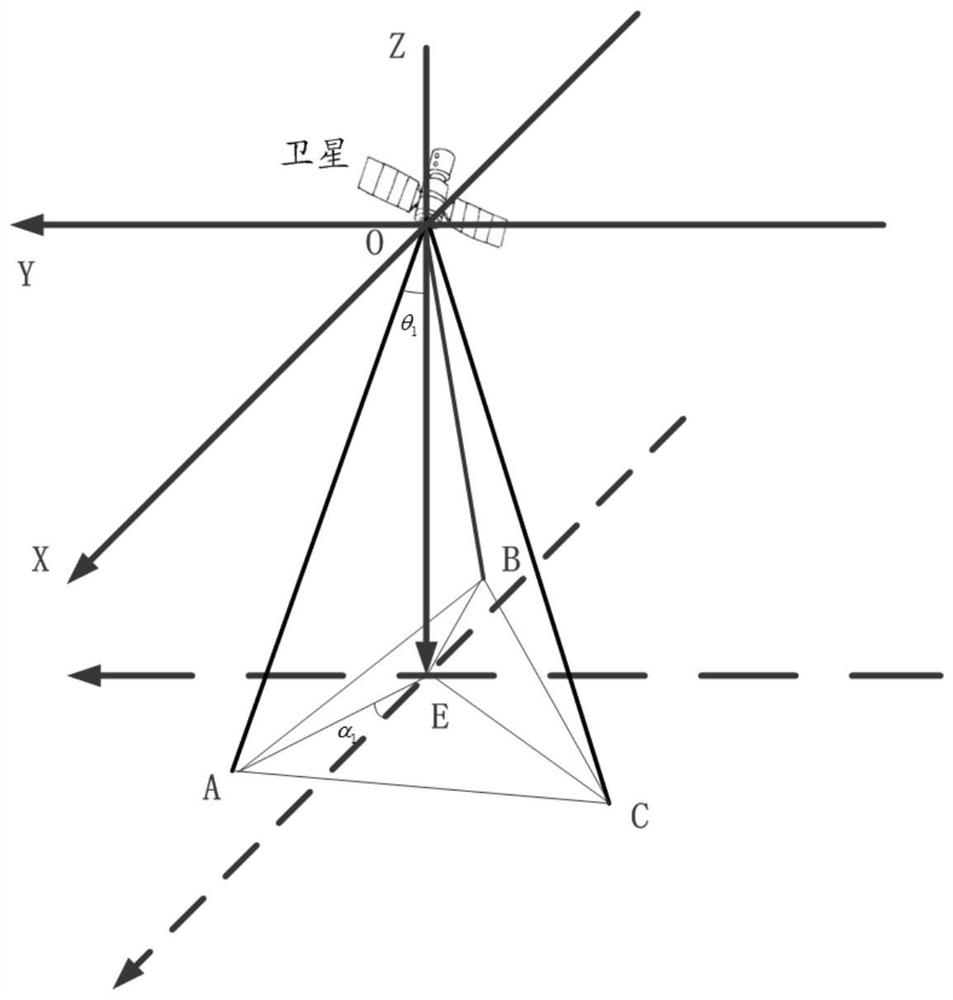
[0085] In this embodiment, the specific implementation of step 2 is as follows: constructing a Cartesian coordinate system. Among them, the origin O of the Cartesian coordinate system is defined as the center of mass of the satellite; the OZ axis is located in the orbital plane, pointing to the center of the earth; the OX axis is located in the orbital plane, perpendicular to the OZ axis, and points to the satellite velocity direction.
[0086] Suc...
Embodiment 3
[0136] In this embodiment, the on-orbit field-free pointing calibration method of the spaceborne multi-beam laser rangefinder includes:
[0137] Step 1, select the calibration area.
[0138] In this embodiment, the Caspian Sea is selected as the area used for calibration. By querying the weather information, the weather in the Caspian Sea is clear without cloud cover, and the sea surface is less windy and the wave height is less than 1m.
[0139] Step 2, obtain the theoretical pointing angle of the multi-beam laser range finder.
[0140] In this embodiment, the specific implementation of step 2 is as follows:
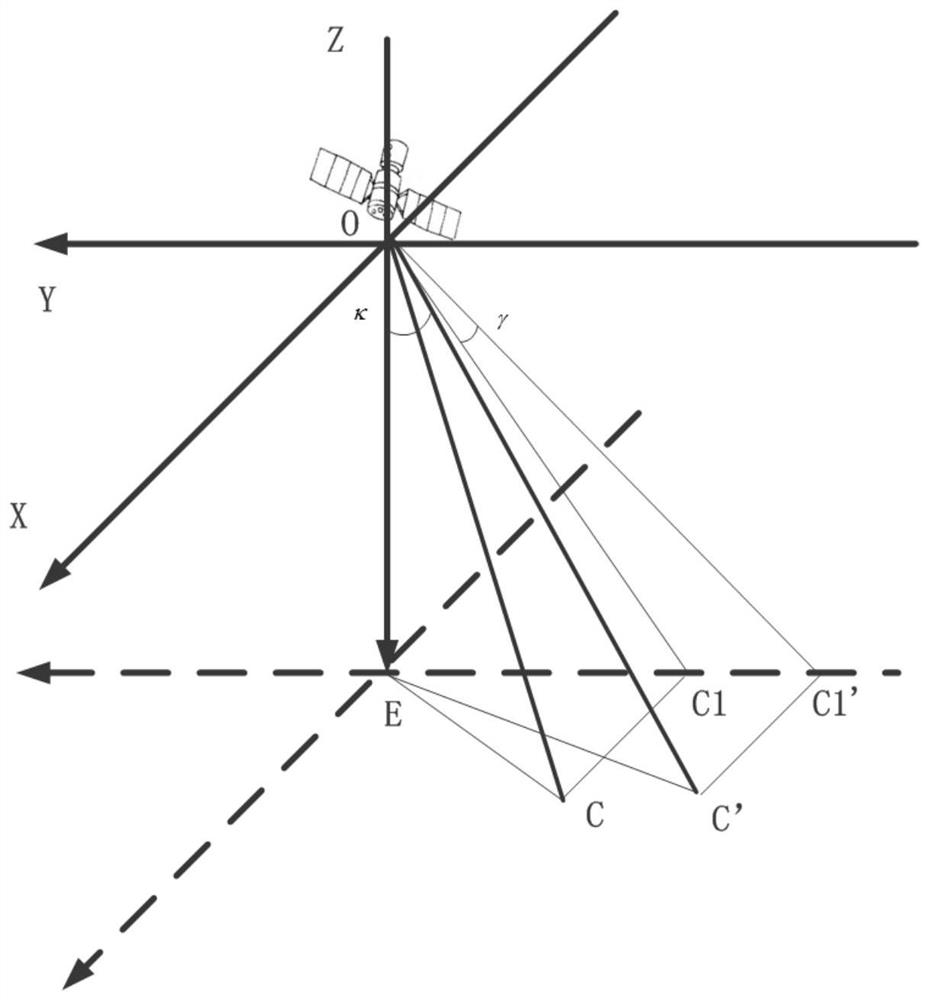
[0141] Construct a Cartesian coordinate system. Among them, the origin O of the Cartesian coordinate system is defined as the center of mass of the satellite; the OZ axis is located in the orbital plane, pointing to the center of the earth; the OX axis is located in the orbital plane, perpendicular to the OZ axis, and points to the satellite velocity direction.
[01...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com