Marine flexible riser boundary vibration control method for model uncertainty
A flexible standpipe and control equation technology, applied in the direction of adaptive control, general control system, control/adjustment system, etc., can solve the problem of low control accuracy, achieve higher calculation speed, reduce calculation amount, and better tracking and adjustment Effect of Vibration Conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
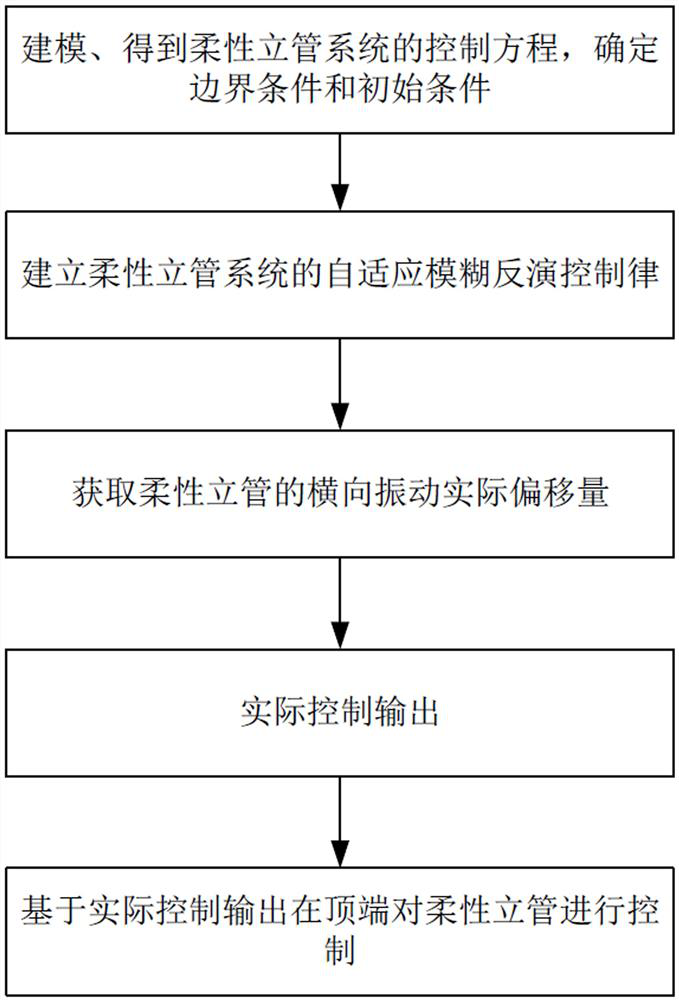
[0079] Boundary vibration control methods for marine flexible risers for model uncertainties, such as figure 2 shown, including the following steps:
[0080]Model the flexible riser, obtain the control equation of the flexible riser system, and determine the boundary conditions and initial conditions of the flexible riser system;
[0081] Based on the adaptive fuzzy inversion algorithm, the adaptive fuzzy inversion control law of the flexible riser system is established; and then through the Lyapunov stability theory, it is verified whether the system is stable and bounded: if it is, go to the next step; if not, readjust the first step A control parameter and / or a second control parameter and / or a third control parameter.
[0082] Obtain the actual offset of the lateral vibration of the flexible riser;
[0083] Substituting the actual offset into the adaptive fuzzy inversion control law to obtain an actual control output;
[0084] Based on the actual control output, the fl...
Embodiment 2
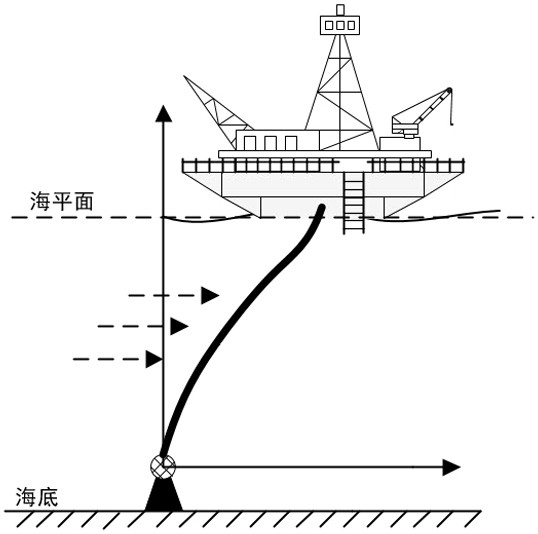
[0086] The schematic diagram of the marine flexible riser system model in this embodiment is as follows figure 1 as shown, figure 1 The dotted arrow in the middle indicates the distributed ocean current, the origin of the coordinate system is at the bottom of the riser, and the controller is at the top (boundary) of the riser for control input to generate lateral force to suppress the vibration of the riser, and the control direction is to the right. Where: the riser length is L , the lateral vibration offset of the riser is w ( x , t ), the distributed ocean current load acting on the riser is f ( x , t ), the boundary disturbance is d ( t ), the space variable is x ; the time variable is t , which in this embodiment represents an operation interval period.
[0087] The control process of the present embodiment is as follows:
[0088] 1. Modeling, dynamic analysis of the flexible riser system model:
[0089] Will figure 1 The kinetic energy of the flexible ri...
Embodiment 3
[0132] On the basis of Example 2, this example conducts experimental verification for the boundary vibration control method of the marine flexible riser with uncertain models:
[0133] System parameter selection: lambda 2 =7.37×10 8 , r 2 =1, k 2 =1, initial value θ 2 (0) is 0. fuzzy membership function mu Fi j ( x i ) adopts Z-shaped membership functions at both ends of the domain of discourse, and adopts triangular membership functions in the middle area. The two input quantities of the two-dimensional fuzzy controller are respectively set to 7 language value levels, so 49 control rules can be obtained. The remaining main parameters of the flexible riser system are shown in Table 1:
[0134] Table 1 Other main parameters of the flexible riser system
[0135]
[0136] Distributed current loads acting on the riser f ( x , t ) is expressed by the following formula:
[0137]
[0138] In the formula, ρ s is the seawater density, C D is the drag co...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com