Robot flexible foot
A flexible foot and robot technology, which is applied in the field of humanoid robots, can solve the problems of complex structure, stuck cylinder and upper platen, etc., and achieve low raw material requirements, convenient kinematics modeling and dynamics simulation, and easy Achieved effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment 1
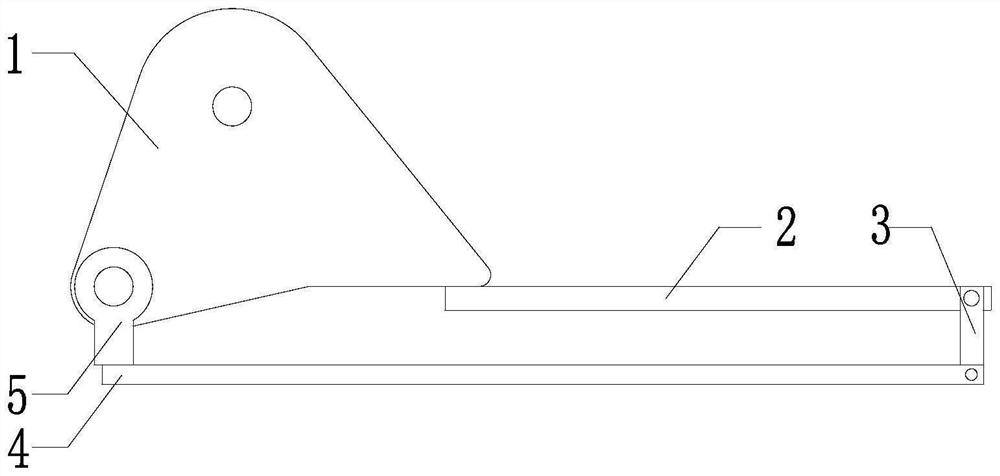
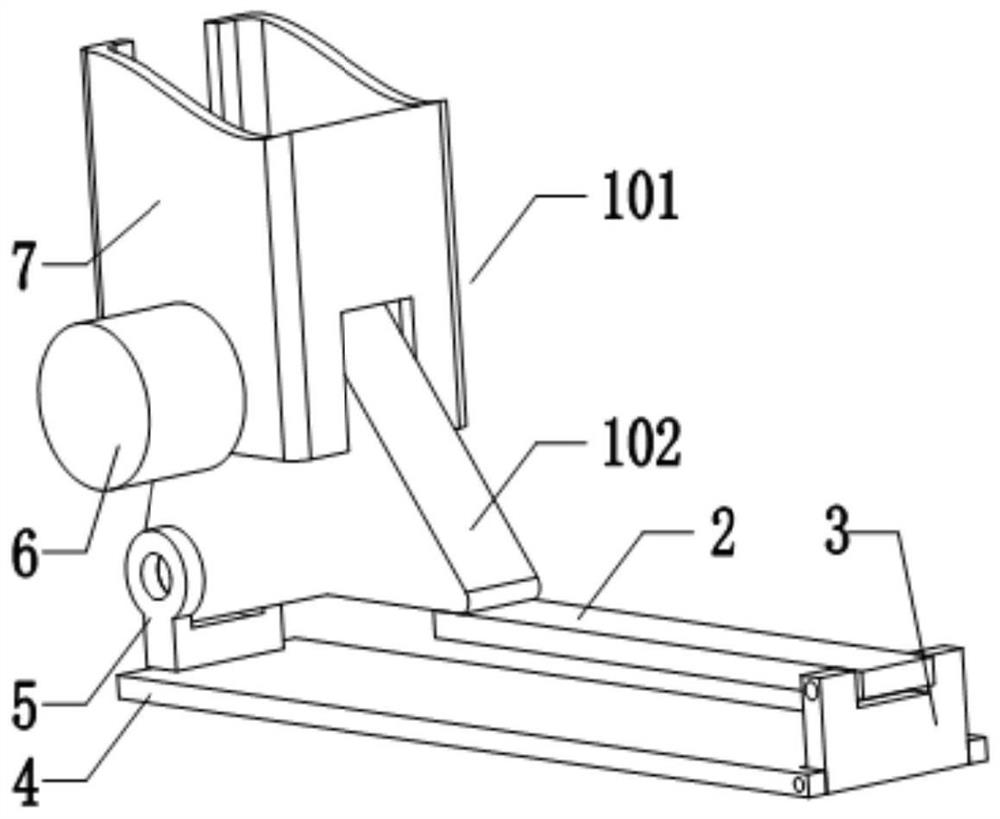
[0028] like figure 1 The shown flexible foot of a robot includes an ankle 1, a foot surface 2, a first connecting rod 3, a sole 4, and a second connecting rod 5 connected end to end in sequence. The foot surface 2 is an elastic plate, one end is fixedly connected to the ankle 1, and the other end is rotatably connected to the first connecting rod 3; one end of the sole 4 is rotatably connected to the first connecting rod 3, and the other end of the sole 4 is connected to the first connecting rod 3 One end of the second connecting rod 5 is fixedly connected, and the second connecting rod 5 is rotatably connected with the ankle 1 .
Embodiment 2
[0030] Based on the first embodiment, the foot surface 2 is an elastic plate, and the rotational connection between the foot surface 2 and the first connecting part 3 is changed to a fixed connection. It should be pointed out that no matter whether the elastic plate is fixedly connected or rotated, the connection is equivalent to a rotating connection. In this way, the three rotating pairs of this scheme can be reduced to two rotating pairs, and the subtracted rotating pair can be changed to for a fixed connection.
Embodiment 3
[0032] Based on the first embodiment, the elastic board is replaced with a rigid board, that is, the foot surface 2 adopts a rigid board. One end of the foot surface 2 is rotatably connected to the ankle 1 through a torsion spring, the other end of the foot surface 2 is rotatably connected to the first connecting rod 3, and the first connecting rod 3 is rotatably connected to one end of the sole 4, and the sole 4 The other end is fixedly connected with one end of the second connecting rod 5 , and the second connecting rod 5 is connected with the ankle 1 in rotation.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com