Rigid-flexible mixed line-driven enhanced ankle joint exoskeleton and control method
An ankle joint and wire-driven technology, applied in the field of exoskeleton, can solve the problems of poor support stability, aggravated human body weight, large energy consumption, etc., and achieve the effect of light weight, fast wearing speed, and simplified workload
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
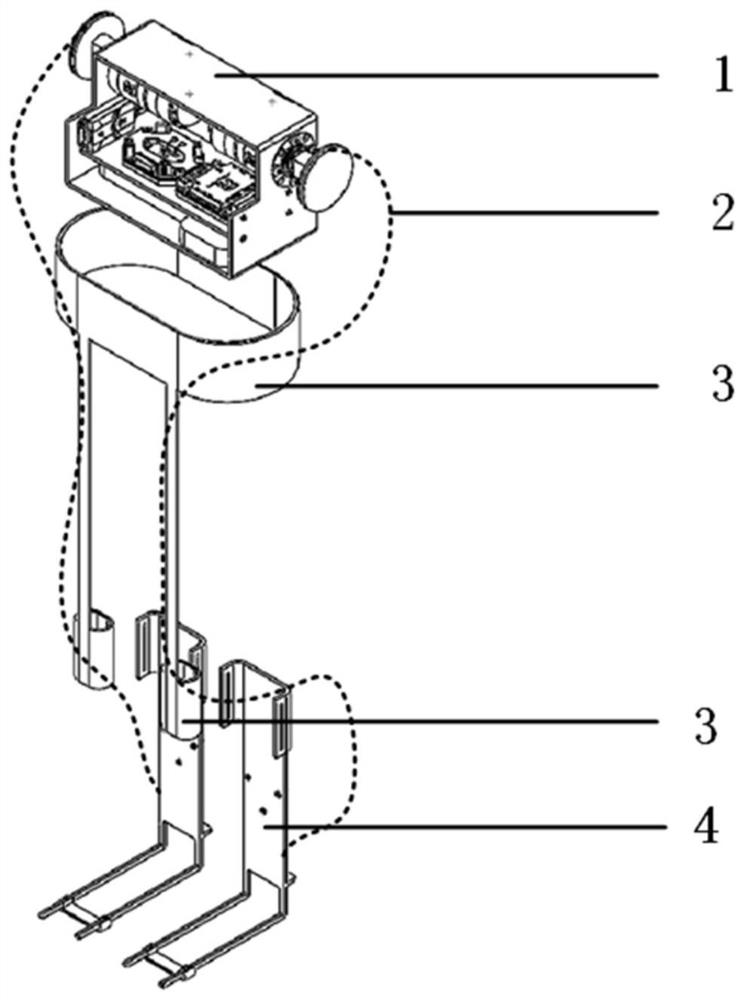
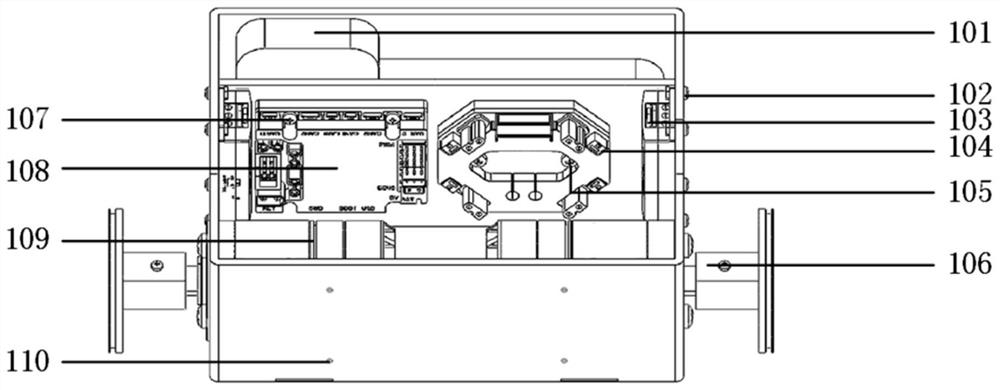
[0045] A rigid-flexible hybrid wire-actuated augmented ankle exoskeleton, such as figure 1 , Image 6As shown, it includes: joint driving module 1, driving line 2, flexible clothing module 3 and joint supporting module 4, the number of joint supporting modules 4 is 2, corresponding to the ankle joints of two legs; joint driving module 1 and driving line 2 Connected; the flexible clothing module 3 cooperates with the human body, including a waist strap 301, a thigh strap 302 and a calf strap 303, on which a waist anchor point and a knee joint anchor point are provided; the joint support module 4 is an ankle joint support module, including The support plate 401 and the base plate, the support plate 401 cooperates with the ankle joint of the human body, the base plate cooperates with the sole surface of the human body, the support plate 401 is provided with an IMU unit 402 and an ankle joint anchor point 405, and the IMU unit 402 communicates with the joint drive module 1 The dr...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com