Cooperative regulation and control method for automatic wharf global system and ART autonomous operation
An automated terminal and global system technology, which is applied in the field of coordinated control between the automated terminal global system and ART autonomous operation, can solve the problems of low level of terminal automation, poor flexibility, and low independent decision-making ability, so as to improve equipment utilization, terminal The effect of improving the level of automation and reducing the probability of congestion
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0053] The following will clearly and completely describe the technical solutions in the embodiments of the present invention with reference to the accompanying drawings in the embodiments of the present invention. Obviously, the described embodiments are only some, not all, embodiments of the present invention.
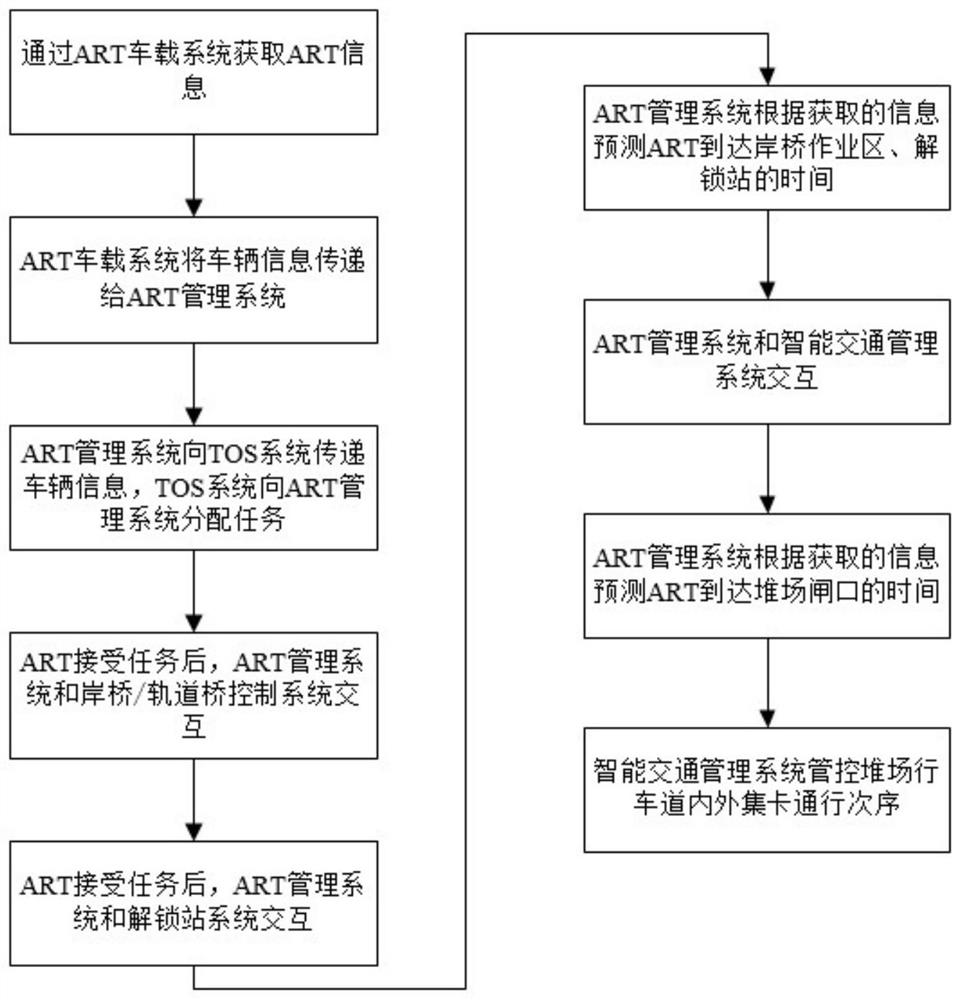
[0054] In the present invention, the ART obtains predetermined information in real time through the ART vehicle-mounted system, and feeds back to the ART management system, so that the ART management system obtains the overall road information and ART information of the automated terminal in real time; the ART management system feeds back the aforementioned ART information to the TOS system, and the TOS The system assigns tasks to the ART management system according to the collection card information fed back by the ART management system, so as to realize the assignment of tasks to the ART. After the ART accepts the task, it automatically plans the path based on the cu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com